Ultrasonic Range Finders
Unlock razor-sharp obstacle detection and navigation for AGVs with sound waves. Discover how ultrasonic sensors deliver reliable, budget-friendly spatial awareness across industrial settings.

Core Concepts
Time of Flight (ToF)
The core principle: distance from the time between sending a sound pulse and its echo returning.
The Blind Zone
Blind zone: the closest range to the sensor face where vibrations from transmitting prevent accurate reads.
Beam Angle
Ultrasonic sensors send sound in a cone—wider beams scan more ground but might pick up off-angle clutter.
Acoustic Impedance
Acoustic impedance: a medium's resistance to sound waves. Hard surfaces bounce them back strong (great detection), soft fabrics swallow them (weak detection).
Cross-Talk
This interference kicks in when multiple sensors fire at the same time, letting one pick up the echo from another's pulse.
Resolution
It's the tiniest distance shift a sensor can spot, mostly down to the sound wave's frequency and the smarts of its processing electronics.
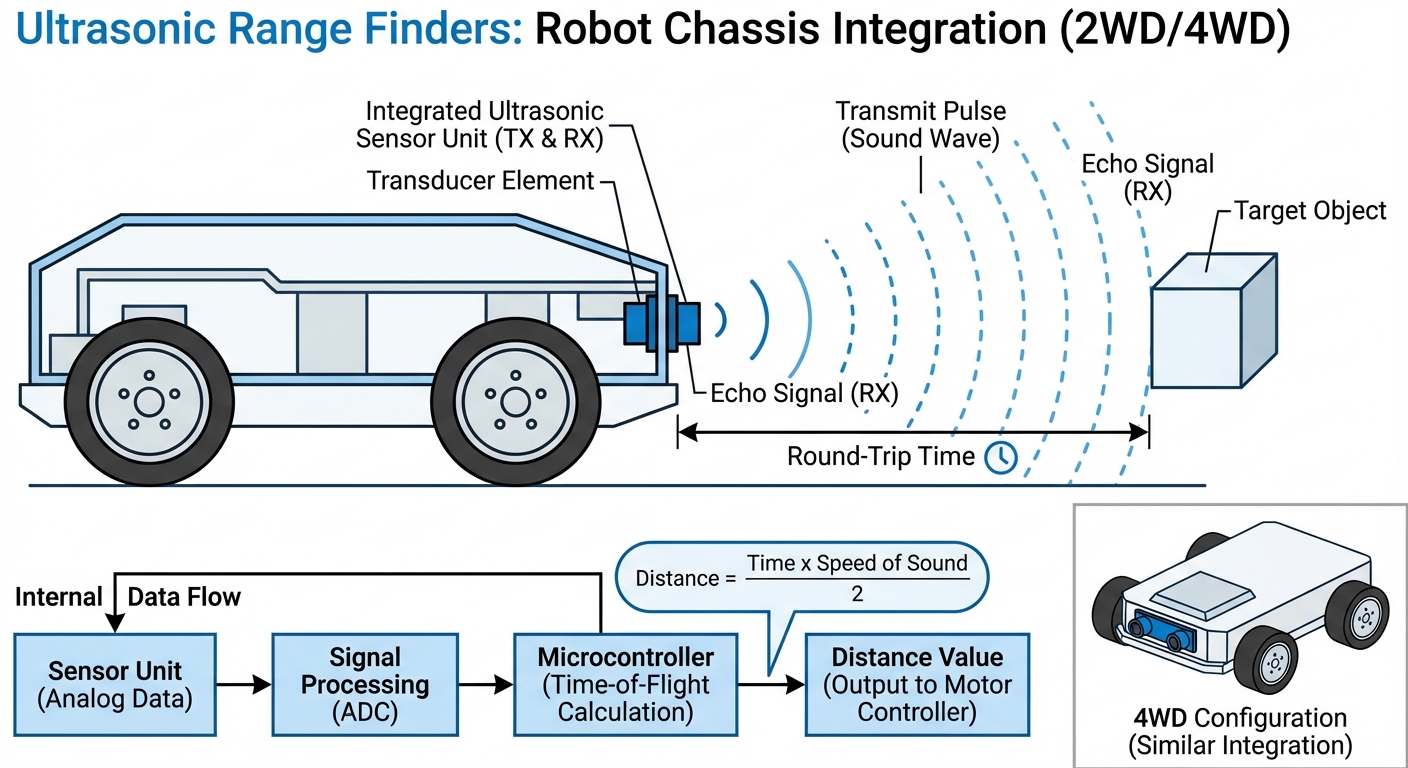
How It Works: The Physics of Sound
Ultrasonic sensors run at 40kHz (inaudible to us humans) and work just like the echolocation bats use. It kicks off when the AGV controller sends a trigger signal to the sensor.
The sensor shoots out a quick burst of ultrasonic pulses (usually 8 cycles). These waves zip through the air at about 343 meters per second. When they smack into something like a warehouse pallet or wall, they bounce right back to the sensor.
The sensor catches that echo and sends out a high digital signal based on the time it took. The robot's microcontroller then crunches the numbers with this formula: . That /2 covers the round trip of the sound wave.
Real-World Applications
Collision Avoidance
Acting like a virtual 'safety bumper,' these sensors spot surprise obstacles in an AGV's way, kicking off emergency stops or slowdowns to dodge accidents in bustling warehouses.
Wall Following Navigation
Simple robots use side-mounted sensors to keep a steady distance from walls, letting them navigate hallways without maps or fancy SLAM tech.
Transparent Object Detection
Unlike LiDAR or infrared that sail right through glass or clear plastic, ultrasonic waves bounce off solid stuff no matter how see-through it is—perfect for bottling plants.
Pallet & Load Detection
Mount these sensors on forklift forks to check if a pallet's there or gauge the distance to the load's face, ensuring a solid lift every time.
Frequently Asked Questions
How does an ultrasonic sensor differ from LiDAR?
LiDAR fires lasers for super-sharp, speedy distance reads but costs more. Ultrasonic uses sound waves—they're cheaper, ace at spotting clear stuff like glass, but trade off on resolution and refresh speed.
What’s the max effective range for standard AGV sensors?
Most industrial ultrasonic sensors for AGVs shine from 2cm to 4 meters (about 13 feet). Some specialty ones go farther, but reliability drops off fast due to sound spreading out.
Can ultrasonic sensors pick up soft stuff like foam or cloth?
Soft materials are tricky—they absorb the sound instead of bouncing it back. Low acoustic impedance things like foam, sponges, or thick fabric often stay 'invisible' to the sensor.
How does temperature affect sensor accuracy?
Sound speed shifts with air temp (roughly +0.6 m/s per °C). Skip temperature compensation in your code, and your AGV could misread by centimeters jumping from a freezing cold store to a steamy warehouse.
What is "Crosstalk" and how do I prevent it?
Crosstalk hits when Sensor A catches Sensor B's echo. Avoid it by triggering sensors one by one (fire A, wait for its echo, then B) instead of blasting them all at once.
Can these sensors work through dust or smoke?
Yep, huge edge over optical sensors. Sound waves, being mechanical, cut through dust, smoke, or mist where light-based gear like cameras or LiDAR gets blinded.
What if the sound hits at a steep angle?
Hit a smooth surface at a sharp angle (over 45° usually), and the wave glances off instead of bouncing back. No detection—it's called 'specular reflection.'
Why is there a minimum detection distance (Blind Spot)?
Right after pulsing, the transducer's membrane keeps vibrating (ringing) briefly. During this 'ring-down,' it can't tell vibration from a real echo, leaving a blind zone of 2-4cm.
Are ultrasonic sensors affected by ambient noise?
Usually not an issue. Factory noise is way lower frequency than the 40kHz+ these sensors use. But watch for high-pitched pneumatic hisses or other ultrasonic gear causing trouble.
How often should I poll the sensor (Sample Rate)?
Sound's slow vs. light, so wait for the echo before the next pulse. At 4m max, round trip's ~24ms—aim for 20-40Hz polling per sensor to stay safe.
What is the typical cone angle width?
Standard ones have a 15°-30° detection cone. AGVs often pick narrow beams for precise mapping, wider for all-around bumper avoidance.
Can ultrasonic sensors detect liquid levels?
Absolutely, they're great for it. Liquids give sound waves a flat, hard surface to reflect off, so tank bots use them for non-contact fluid level checks.