UART Serial Communication
Universal Asynchronous Receiver-Transmitter (UART) is like the central nervous system for today's AGVs, linking high-level nav brains to low-level motors and sensors with rock-solid, direct data flow.

Core Concepts
Asynchronous Timing
Unlike SPI or I2C, UART skips the shared clock. Devices just sync on a set baud rate ahead of time to make sense of the data.
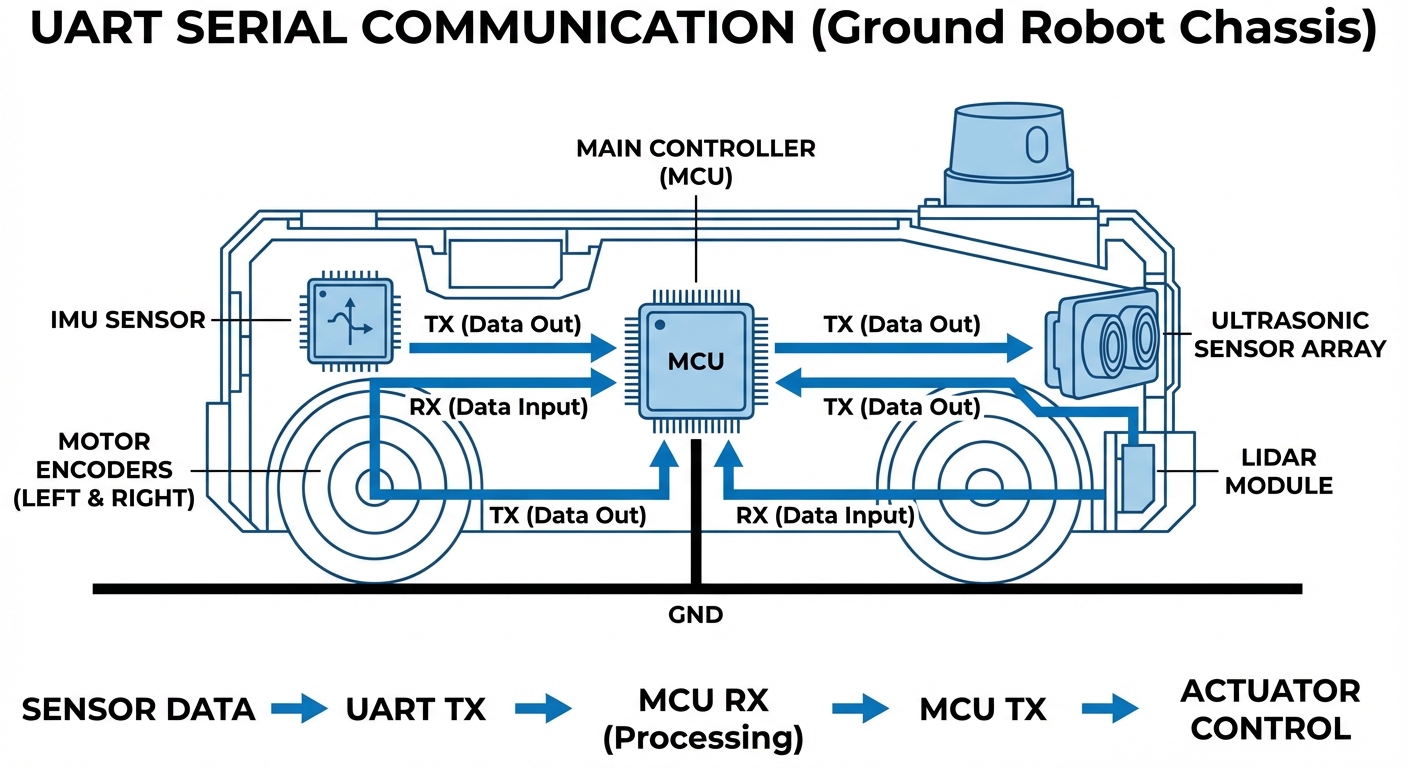
TX & RX Lines
It runs on two wires: Transmit (TX) and Receive (RX). Controller's TX plugs straight into the peripheral's RX for that crossed link.
Baud Rates
Speed matters big time. Common baud rates like 9600 or 115200 bps dictate nav data zip. Mismatch? Gibberish and bot blunders.
Data Integrity
In noisy factories, parity bits in UART frames spot errors before commands kick off movement.
Start & Stop Bits
No clock means start and stop bits bookend each data chunk, telling the receiver exactly when to grab the bits.
Full Duplex
UART does full-duplex, so AGVs send speed commands while pulling in wheel odometry at the same time.
How It Works: The Data Stream
At the hardware core, UART bridges the CPU's parallel bus to the serial line. Nav decides 'go forward,' dumps a byte to the UART in parallel.
The UART's shift register serializes it, bit by bit over TX, kicking off with a low 'Start Bit' to alert the receiver.
Receiver side—like a motor driver—samples at baud rate, rebuilds the byte, and fires an interrupt for instant command action.
Real-World Applications
LiDAR & Sensor Modules
Many 2D LiDARs for SLAM spit point clouds over fast UART, letting the main computer map warehouses live.
Motor Control Units (MCUs)
Motor drivers chat via UART too. CPU beams velocity vectors and PID tweaks; drivers report current, heat, encoder counts.
Wireless Telemetry
Bluetooth, Zigbee, LoRa modules hook up through UART, so fleet software can wireless-push route changes without network bloat.
Diagnostics & Debugging
Nearly every embedded Linux robot has a 'Console Port' that's UART. Techs serial in for root access, boot logs, and field fixes.
Frequently Asked Questions
What's the difference between UART, I2C, and SPI in robotics?
UART's async, point-to-point on two wires, no clock—perfect for longer runs and device chats. I2C handles multi-master for lots of slow sensors on a board. SPI's fast sync for quick stuff like screens or SD cards over short hops.
How far can a UART signal travel reliably?
TTL UART shines short-range, under 1m (3ft), before noise bites. For robot-longer hauls, flip to RS-232 or RS-485 differential for hundreds of meters.
What happens if the baud rates are mismatched?
Speed mismatch (9600 vs 115200)? Bit timing drifts, receiver samples wrong, framing errors spawn garbage chars and comms collapse.
What is Hardware Flow Control (RTS/CTS) and do I need it?
RTS (Request to Send) and CTS (Clear to Send) are bonus wires to dodge buffer floods. Busy receiver? It flips RTS to pause sender. Vital for speedy stuff like big map downloads or firmware flashes.
Can I connect a 5V sensor to a 3.3V Microcontroller UART?
Hooking up 5V and 3.3V devices directly can wreck the 3.3V pin. You'll need a logic level converter (shifter) or a voltage divider on the RX line of the 3.3V device. That said, some modern microcontrollers (like certain STM32 inputs) are "5V tolerant," but always check the datasheet to confirm.
How do I troubleshoot UART issues on an AGV?
Kick things off by double-checking baud rates on both sides. Grab a USB-to-TTL serial adapter (like an FTDI) to "sniff" the TX and RX lines via a computer terminal. For top-notch troubleshooting, an oscilloscope or logic analyzer will confirm clean square waves and spot-on voltages.
What is Software Serial vs Hardware Serial?
Hardware Serial taps into dedicated microcontroller circuits for precise timing, offloading the CPU. Software Serial (aka "bit-banging") fakes UART with code on regular GPIO pins—it's CPU-hungry and shaky at high speeds, so stick with Hardware Serial for robotics.
Is UART suitable for safety-critical stop commands?
UART's solid, but it's no match for a dedicated E-Stop hardware loop in terms of fail-safes. For critical safety, add checksums (like CRC) to catch corruption, plus a timeout (watchdog) to halt the robot if the data stream drops.
Can I daisy-chain multiple devices on one UART line?
Nope, standard UART is strictly one-to-one (one sender, one receiver). For multi-device setups, switch to RS-485 (UART-based but electrically different) or a hardware multiplexer to juggle connections.
How does UART handle parity errors?
When a parity error hits, the UART hardware just flags it—no auto-retry. Your firmware has to spot that flag and request the packet again.
What is the maximum speed (baud rate) for UART?
115200 baud is popular, but today's microcontrollers handle up to several Mbps (like 3 Mbps+). Just keep wiring short and shielded (twisted pair) at higher speeds to avoid signal edge rounding from capacitance.