SPI Interface
Unlock blazing-fast, perfectly synced communication between your microcontroller and sensors. SPI is the powerhouse for real-time data in modern AGVs, delivering zero-delay control for spot-on navigation.

Core Concepts
Synchronous Clock
SPI relies on a dedicated clock line (SCLK) from the master, locking everything in perfect sync—no need for start/stop bits.
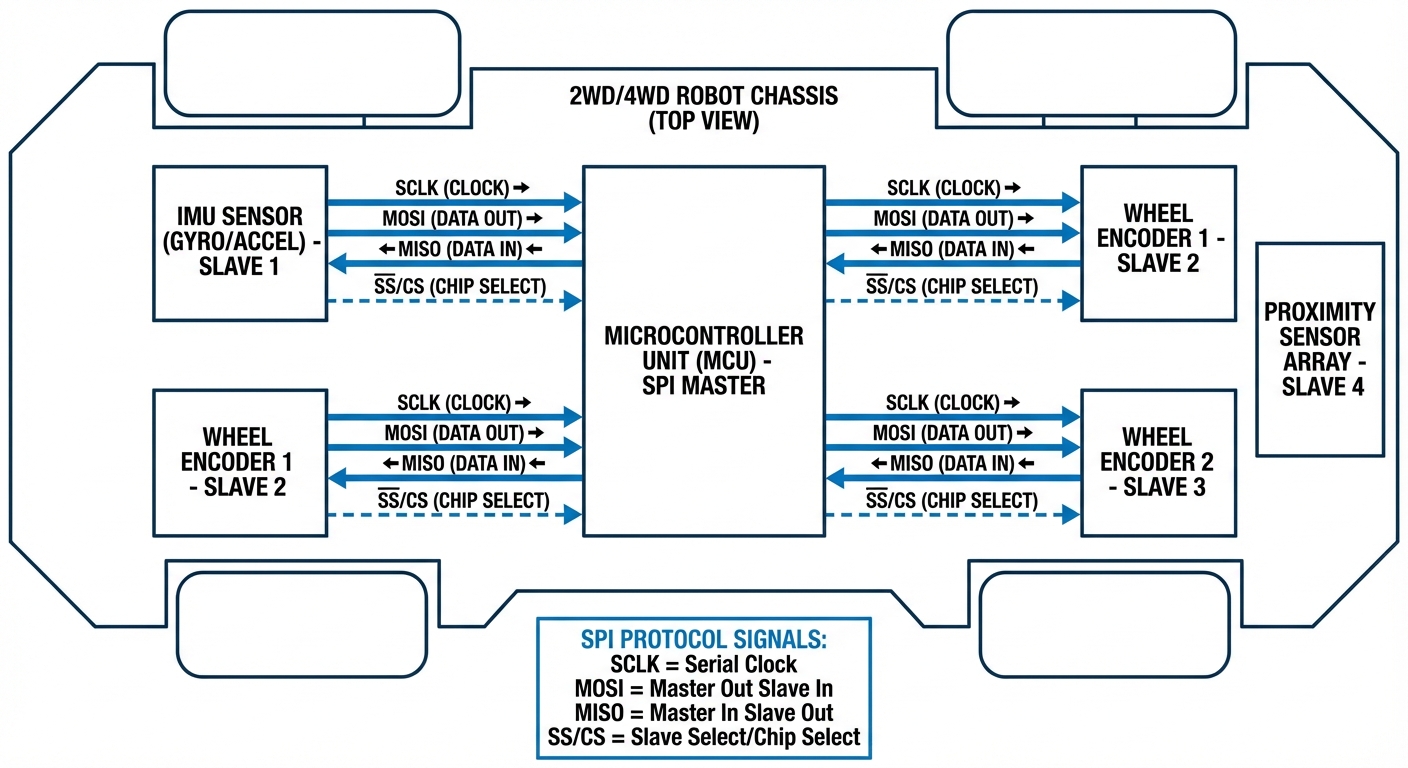
Master-Slave Architecture
One 'Master' (like your AGV's main brain) bosses around one or more 'Slaves' (IMUs, drivers), keeping data flow dead simple.
Full Duplex
It handles send-and-receive at the same time. While firing off a motor command, your AGV grabs encoder feedback right in that same clock tick.
High Throughput
SPI flies at MHz speeds (10MHz to 50MHz+), blowing past UART or I2C—perfect for data-heavy stuff like LIDAR.
4-Wire Logic
It uses four clear lines: MOSI (Master Out Slave In), MISO (Master In Slave Out), SCLK (Clock), and SS/CS (Slave Select) for rock-solid control.
Short Range
Built for short-haul onboard chats. In robots, stick to PCB traces or tiny cables to dodge signal glitches and noise.
How It Works: The 4-Wire Exchange
In your AGV setup, the microcontroller (Master) kicks things off by dropping the Chip Select (CS) low for the target—like a gyroscope—signaling 'your turn for data.'
Then the Master pumps out clock pulses on SCLK. Each pulse shifts a data bit from MOSI to the sensor, while grabbing one back from MISO—all in sync.
This shift-register magic delivers insane speed. No wasted cycles on start/stop bits or parity like async protocols—every tick is pure data. For a two-wheeler balancing or dodging warehouse chaos, those microsecond responses are make-or-break.
Real-World Applications
Inertial Measurement Units (IMUs)
AGVs lean on IMUs for tilt and acceleration intel. SPI lets the CPU poll accelerometers and gyros over 1kHz, keeping self-balancing rock-solid and turns buttery smooth.
High-Resolution Encoders
Absolute magnetic encoders on robot arms or wheels love SPI for instant position reads—no lag from pulse counting, crucial for precise pick-and-place.
TFT/LCD Displays
HMIs on mobile bots need fat data pipes for live screen updates. SPI powers those displays to flash status, battery, and errors in real time.
Black Box Data Logging
Dumping logs to SD cards? Classic SPI move. Robots capture sensor streams, paths, and errors at high speeds for easy post-run analysis.
Frequently Asked Questions
What is the main difference between SPI and I2C for robotics?
Speed and wiring are the big ones. SPI crushes it at 10MHz+ with full-duplex for bandwidth hogs like IMUs. I2C tops out at 100kHz/400kHz, half-duplex, but just needs two wires—great for basic sensors or tight pin budgets.
What is the maximum reliable cable length for SPI?
SPI is for onboard use only. Reliability drops after 10-20cm based on speed and capacitance. For spanning a big AGV (>30cm), switch to RS-485, CAN, or use SPI extenders carefully.
How many slave devices can I connect to one SPI bus?
It boils down to spare GPIO pins on your Master for Chip Select (CS) lines—one per slave. Or daisy-chain if supported, but that ramps up software hassle.
What are SPI Modes (CPOL and CPHA) and why do they matter?
Four modes (0-3) set by Clock Polarity (CPOL) and Phase (CPHA)—idling high/low and sampling on rising/falling edges. Match your Master's setup to the Slave's datasheet exactly, or nothing talks.
Why is SPI preferred for motor drivers in AGVs?
SPI goes way beyond basic PWM. Your robot controller can tweak current limits, microstepping, decay modes on the fly, and snag instant error reads like overheat or stalls.
Can SPI handle 5V and 3.3V logic levels mixed?
No way—direct hookup is risky. 3.3V MCU to 5V sensor? Grab a level shifter. A 5V MISO frying a 3.3V input can toast your chip. Always double-check voltages.
What is "Daisy Chaining" in SPI?
Daisy-chaining links one slave's MISO to the next's MOSI in a chain—just one CS for all. Data ripples through like a shift register, adding latency; only for compatible hardware.
How do I troubleshoot SPI communication failures?
Grab a logic analyzer. Confirm CS drops before clock. Check if clock's too zippy for the slave. MOSI/MISO swapped? Common goof. Hunt ground loops or loose wires for flaky data.
Does SPI have error checking?
Native SPI skips built-in checks—no CRC like CAN or ACKs like I2C. For mission-critical data, layer on checksums or CRC in your code.
Is SPI susceptible to electrical noise in industrial environments?
Yep, it's single-ended (ground-referenced), not differential. In noisy factories with big motors, keep SPI lines short, shielded, and far from power cables to avoid corruption.
What is QSPI (Quad SPI) and do I need it?
Quad SPI kicks it up a notch with 4 data lines instead of the usual 2 (MOSI/MISO), transferring data 4x faster per clock cycle. It's mainly for connecting external Flash memory or RAM in high-performance robotics controllers, while standard sensors usually stick with regular SPI.
Can I use DMA (Direct Memory Access) with SPI?
Yes, absolutely—and it's a must for robotics! DMA lets the microcontroller shuttle SPI data to memory in the background without hogging the CPU. That frees up the processor to handle path planning or safety checks while scooping up sensor data.