Series Elastic Actuators
Transform mobile robotics with compliant actuation tech. Series Elastic Actuators (SEAs) slip a tuned spring between motor and load, unlocking killer force control, shock handling, and safety for tomorrow's AGVs.

Core Concepts
Mechanical Compliance
Unlike rigid setups, SEAs add elasticity on purpose. That 'give' lets the robot react to outside forces mechanically, even before the control loop kicks in.
Force Fidelity
By tracking the spring's deflection, you calculate torque super precisely via Hooke’s Law—no pricey torque sensors needed.
Shock Tolerance
The spring acts like a low-pass filter for shocks, shielding the gearbox and motor from bangs during crashes or bumpy rides.
Energy Storage
SEAs store and release energy like a battery. This boosts efficiency in repeat tasks or wobbly moves on mobile bots.
HRI Safety
In human-robot teamwork (HRI), the actuator's low impedance slashes impact forces, making AGVs safer around people.
Contact Stability
SEAs deliver steady force control even against rigid stuff like docks or heavy pallets—no shaky 'chattering' like in stiff position-controlled bots.
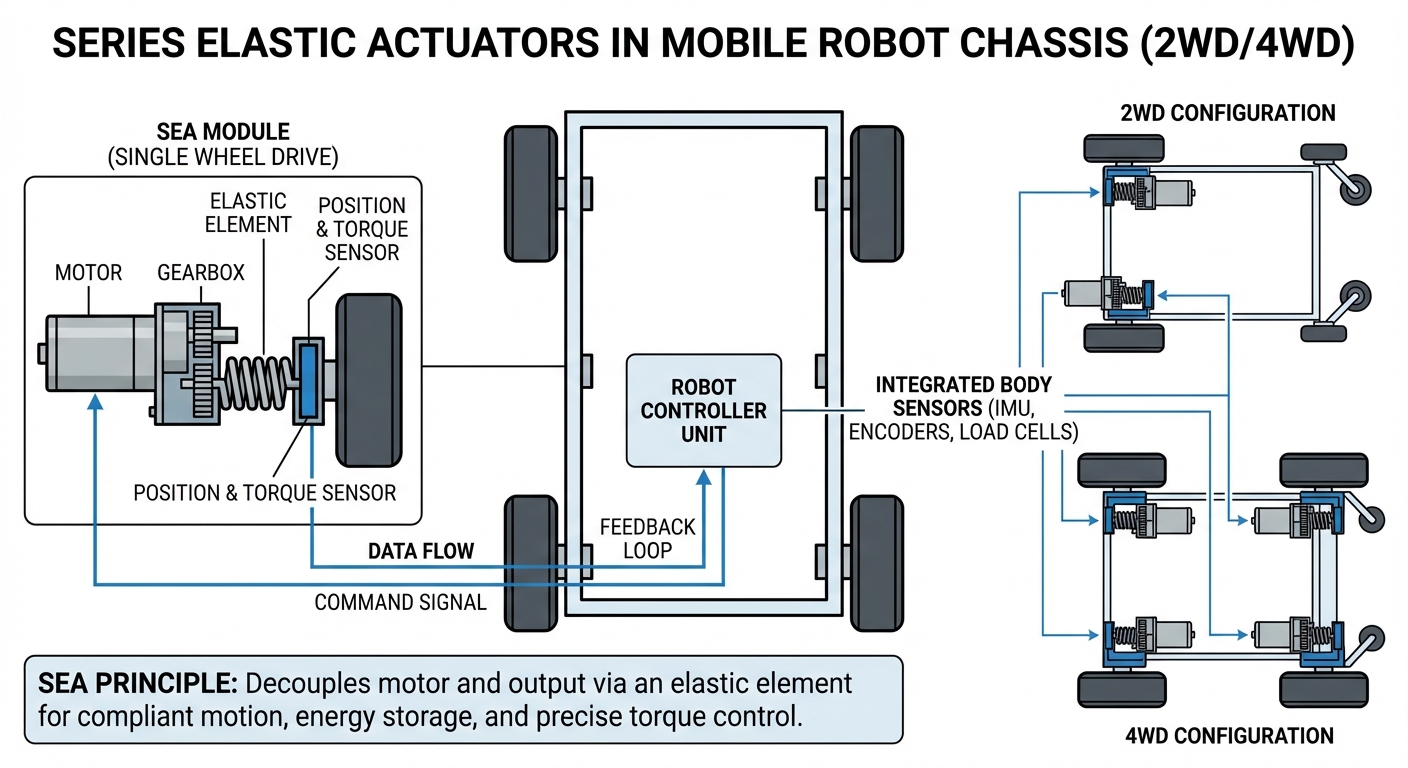
How It Works: The Architecture
In a classic 'stiff' actuator, the motor hooks straight to the gearbox and load. In a Series Elastic Actuator, a springy bit—usually a custom spring or flexure—sits between the gears and output load.
The control system gauges the spring deflection ($x$) with high-res encoders. With known stiffness ($k$), force ($F$) is instant via Hooke's Law: $F = k \cdot x$.
This setup flips force control into a position task for the motor. Compressing the spring just right lets the AGV nail torque to wheels or lifts, decoupling motor inertia from the load.
Real-World Applications
Collaborative Warehousing
SEA-equipped AGVs thrive in busy aisles. Hit something? The actuator soaks up the energy, sparing people and goods—no fences required.
Rough Terrain Logistics
Outdoor logistics bots use SEAs in suspension and drives to eat up shocks from potholes or gravel, keeping electronics safe and payloads steady.
Heavy Payload Handling
For forklifts and tuggers, SEAs tame huge jolt forces from quick stops or starts, stretching transmission and gear life while cutting downtime.
Dynamic Docking
When AGVs dock for charging or swaps, SEAs enable 'gentle' presses for solid connections without stressing motors or connectors.
Frequently Asked Questions
What is the primary difference between an SEA and a traditional actuator?
The key difference is that spring in series with the drivetrain. Traditional ones are 'stiff,' linking motor straight to load. SEAs add 'give' for top-notch force control and shock absorption, trading a bit of bandwidth.
Do Series Elastic Actuators reduce the positional accuracy of an AGV?
They might a tad, but it's no biggie. The compliance means fancy control loops compensate for spring stretch, but for most AGV work, the precision is plenty good.
Are SEAs suitable for high-speed applications?
Generally, SEAs have lower bandwidth than rigid ones, so not great for super-fast vibes. But at warehouse AGV speeds (1-3 m/s), they shine and handle bumps better.
How does an SEA improve the lifespan of an AGV?
The spring filters out shock peaks. Bump or hard stop? It grabs that impulse energy, saving gearbox teeth and motor bearings from cracking or warping.
Is the control logic for SEAs more complex to implement?
Yep, it's trickier with that resonance. Needs nested loops (torque inside position/velocity) and fine tuning to dodge shakes, but many modern drivers handle it out of the box.
Can SEAs be retrofitted onto existing AGV fleets?
Retrofitting is difficult because SEAs require additional physical space for the spring mechanism and usually a second encoder to measure the spring deflection. It is usually a design decision made at the chassis development stage.
Does the spring element wear out over time?
Like all mechanical parts, fatigue is a factor, but industrial SEAs use high-grade steel or composite flexures designed for infinite life within their rated deflection range. Routine maintenance usually focuses on the bearings rather than the spring itself.
How do SEAs compare to current-based torque control?
Current-based control is cheaper but suffers from friction and stiction in the gearbox, making low-force control inaccurate. SEAs measure torque at the output (after the gearbox), bypassing friction issues and providing much higher "force fidelity."
What happens if the spring breaks?
This is a critical failure mode. Most SEA designs include mechanical hard stops that limit deflection. If the spring breaks, the system hits these stops and acts like a (loose) rigid actuator, allowing the robot to limp home or brake safely.
Do SEAs consume more power?
It depends on the task. For holding static loads, they are similar to rigid actuators. However, in cyclic tasks (like lifting or walking gaits), the spring can store and release energy, actually reducing overall power consumption compared to rigid systems.
How do I select the right stiffness (k) for my application?
Choosing stiffness is all about trade-offs. Lower stiffness gives you better force sensing and safety, but it cuts bandwidth. Higher stiffness boosts positioning speed, though it lowers shock tolerance. Your choice depends on payload mass and the interaction frequency you need.
Are SEAs cost-prohibitive for small fleets?
Upfront, they're more expensive thanks to the extra mechanical parts and sensors. But the total cost of ownership (TCO) often ends up lower—less gearbox damage, fewer sensor replacements, and safer ops in shared spaces.