Robotic Manipulator Arms
Turn everyday AGVs into flexible mobile manipulators for tricky pick-and-place jobs. Pair multi-axis arms with rolling bases, and you've got dynamic machine tending and item handling—no fixed setups required.

Core Concepts
Degrees of Freedom (DoF)
Joint count sets the arm's reach and twist. 6-DoF means the gripper hits any spot in any angle, key for grabbing off shelves.
Visual Servoing
Unlike bolted-down bots, mobile manipulators use wrist cams to fix base position slips, zeroing in on the target.
Center of Gravity
Dynamic stability is key. The arm talks to the base to avoid tip-overs when hoisting heavy stuff at full stretch.
End-Effectors
End-tooling makes the arm shine. From jaw grippers and vac cups to powered screwdrivers for assembly.
Collaborative (Cobot)
Today's mobile arms pack torque sensors for instant collision stops, so they play safe with humans—no cages.
Unified Kinematics
Smart software links AGV wheels and arm as one kinematic chain for fluid, synced moves.
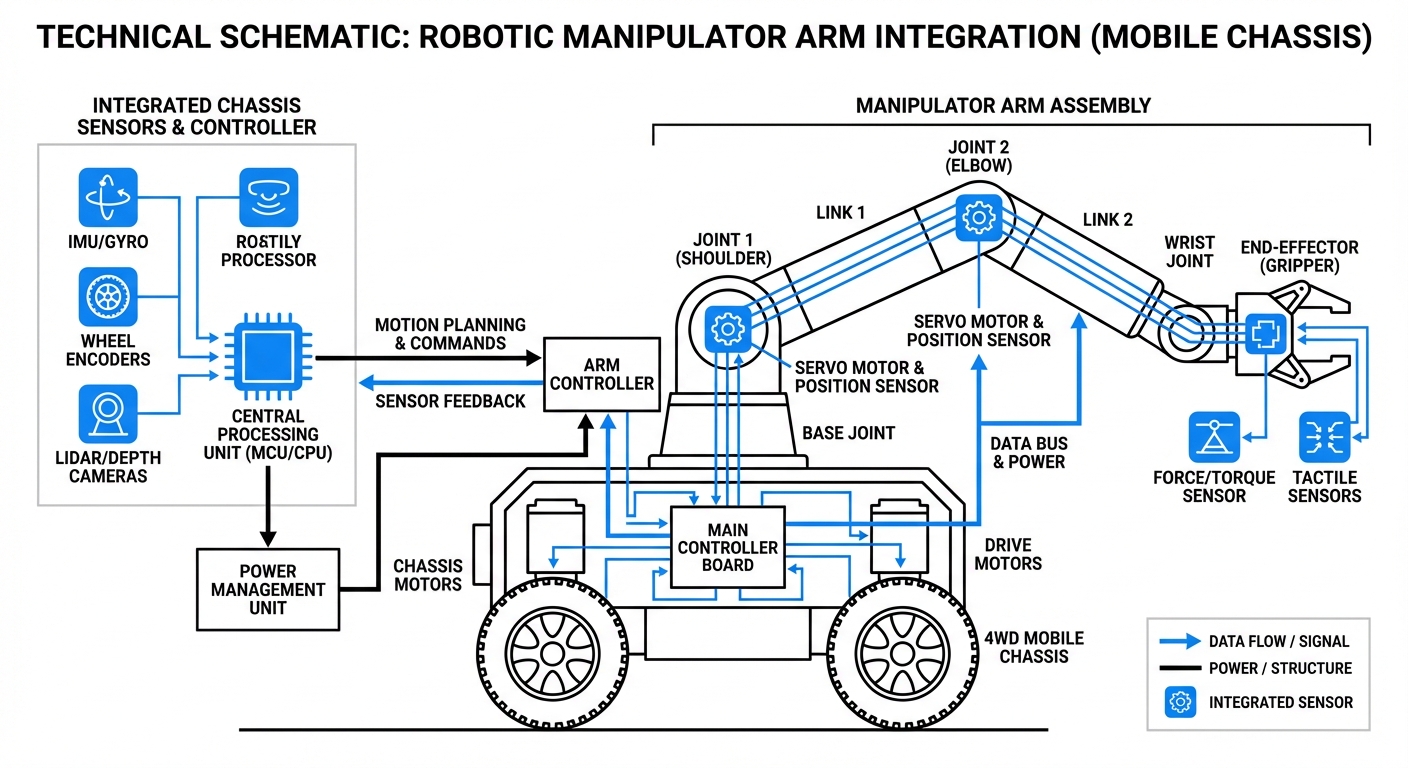
How Integrated Mobile Manipulation Works
Building a 'Mobile Manipulator' isn't just slapping an arm on a cart. You need one power/logic system. The brain crunches inverse kinematics for arm joints relative to the base's ever-shifting spot.
The arm sips from the AGV's big traction battery via slick DC-DC converters. While rolling, base LIDAR clears the zone; wrist RealSense or stereo cams spot targets via markers or AI detection.
Last up, stability smarts track center-of-mass shifts. Full arm extension with heavy load? Base drops stabilizers or tweaks wheel torque to fight tipping, keeping things safe on the move.
Real-World Applications
Flexible Machine Tending
Skip one-arm-per-CNC: one mobile manipulator tends 10 machines, loading stock and grabbing parts as needed.
E-Commerce Piece Picking
Beyond pallets, arm-toting AGVs pluck single items (totes, boxes, bottles) from shelves for straight-to-order fulfillment.
Semiconductor Cleanrooms
Mobile manipulators shuttle fragile wafer carriers (FOUPs/SMIFs) between tools, dodging human germs and shakes in ultra-clean ISO Class 1 spots.
Laboratory Automation
In life sciences labs, they ferry microtiter plates between incubators, handlers, and readers for round-the-clock screening.
Frequently Asked Questions
What is the difference between a standard AGV and a Mobile Manipulator?
Standard AGV? Just hauls goods A to B. Mobile Manipulator adds an arm for real interaction—grabbing stuff, hitting buttons, loading machines—instead of mere transport.
How does the robot handle power consumption for both driving and the arm?
Mobile manipulators usually share a single Li-ion battery pack. A power distribution board keeps things steady—regulating voltage for the sensitive arm controller while handling those big current spikes from the drive motors. Picking the right battery size is key to powering through a full shift.
Does the robot arm move while the AGV is driving?
In most industrial safety setups, the arm parks in a safe, compact spot during transit to drop the center of gravity and avoid collisions. That said, cutting-edge 'whole-body control' algorithms are popping up, letting it move simultaneously for quicker cycle times in controlled areas.
How precise is a mobile manipulator compared to a fixed industrial robot?
Fixed robots get their sub-millimeter precision from rock-solid mounting. Mobile bases deal with suspension flex and navigation errors (±10mm). Mobile manipulators fight back with 'eye-in-hand' cameras that visually zero in on the target right before grabbing, fixing any base inaccuracies.
What happens if the arm picks up something too heavy?
Today's arms monitor current in their joints to sense payload weight. If it exceeds the safe limit for the arm's current reach (risking a tip-over), the system hits an emergency stop or blocks the lift to safeguard the hardware.
Do I need to program the AGV and the arm separately?
Ideally, nope. We use unified software stacks (often ROS 2-based) where one 'mission' runs the show. Take 'Pick object at Station A'—it handles navigation, docking, arm extension, grasping, and undocking all in one go.
What safety standards apply to mobile manipulators?
This is a complex area overlapping several standards. The primary ones are ISO 3691-4 (for driverless trucks) and ISO 10218-1/2 (for robots). The combined system usually requires a specific risk assessment (ISO 12100) to address hazards like arm extension while moving.
Can these robots work on uneven floors?
Mobile manipulators love flat, smooth industrial concrete floors. Bumpy surfaces add pitch and roll to the base, throwing off the end-effector big time. Suspension helps some, but steep slopes can mess with precise docking and picking—that's when deployable stabilizer legs come in handy.
What is the typical payload capacity?
Collaborative mobile arms typically handle 3kg to 16kg payloads. The arm motors might lift more, but the mobile base's stability (and counterweight) is usually the real bottleneck, not the arm's raw strength.
How do they interface with legacy machines?
This is a huge perk. Forget tearing up floors for conveyors—mobile manipulators can push buttons or open doors on old equipment, letting you automate legacy machines without pricey electrical upgrades or PLC hookups.
What maintenance is required?
Routine maintenance means checking wheel wear (to keep navigation spot-on), lubing arm joints, and eyeing internal cables that wear out faster from all the movement vibes. Keep sensors and cameras dust-free for sharp visual performance.
Is WiFi latency an issue for control?
The robot handles safety loops and instant motion planning onboard to dodge latency hiccups. WiFi's just for high-level fleet stuff like task assignment. So, a quick network blip won't halt a pick-and-place in progress.