PID Controllers
The math pulse of dead-accurate navigation, PID control shrinks the gap between your robot's spot and its target. Crucial for buttery line following, spot-on speed control, and rock-solid stability in today's AGV fleets.

Core Concepts
Setpoint (SP)
The target your robot chases. In line following, that's usually '0'—smack center on the line.
Process Variable (PV)
The real deal from your sensors. For AGVs, it's live feedback from mag or optical sensors on current position.
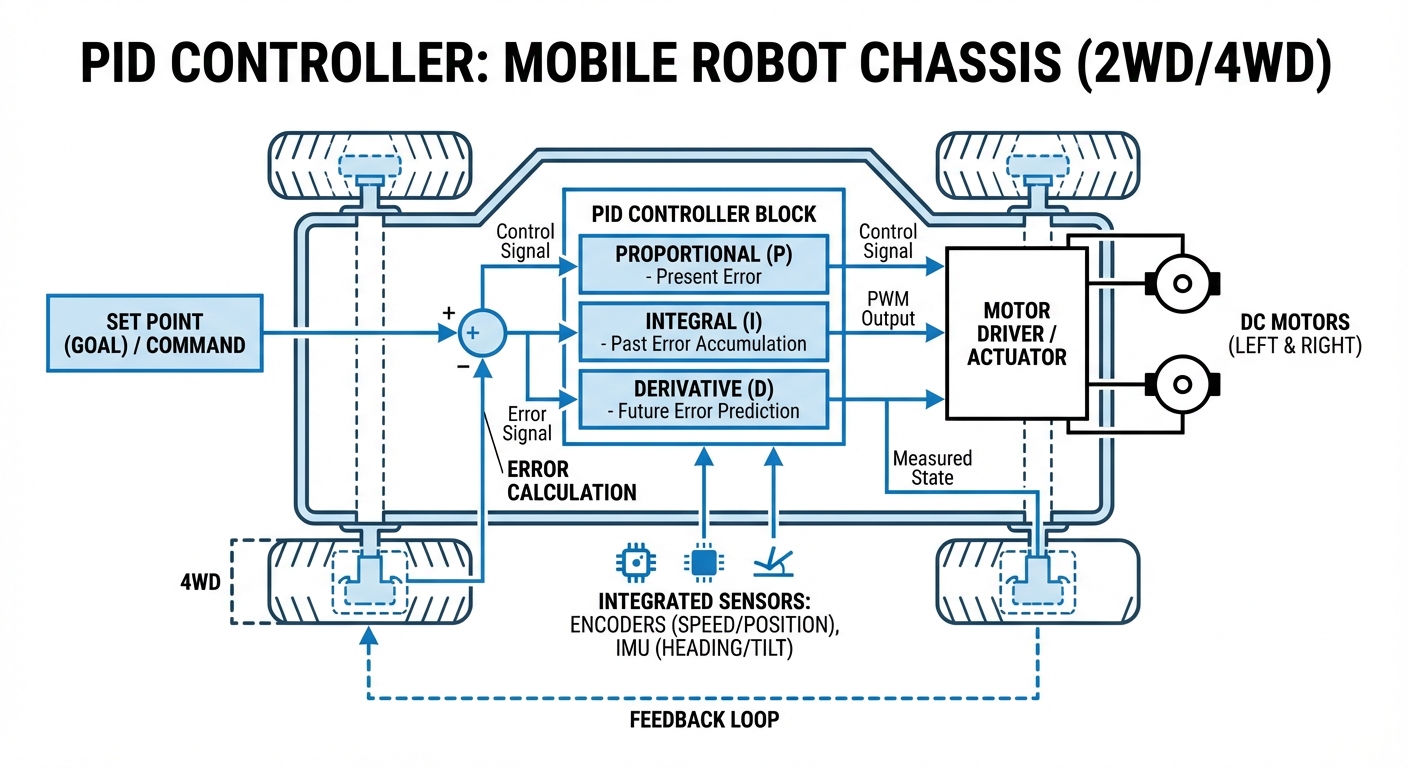
Proportional (P)
Tackles the error right now. Output scales straight with distance from the line—bigger Kp means fiercer pushback on mistakes.
Integral (I)
Catches buildup from past errors. It wipes out steady-state offsets so your robot doesn't drift off-center forever.
Derivative (D)
Guesses future slip-ups from how fast error's changing. Like brakes, it cuts overshoot and wobbles during corrections.
Tuning
Tweaking those Kp, Ki, Kd values. Get it right, and your shaky robot turns into a sleek, efficient beast.
How It Works
PID's a go-to feedback loop in industrial controls. For AGVs, it starts with sensors spotting the line's position against the robot's center.
Sensor readings spit out an 'Error Value' (gap between actual and ideal position). The PID brain cranks out three parts: Proportional for now, Integral for past buildup, Derivative for change rate.
Add those up for a control signal that tweaks PWM to the motors. Result? Smooth steering back to center, ditching jerky 'bang-bang' vibes.
Result:
Real-World Applications
Line Following AGVs
The classic: PID glues the robot to mag tape or painted lines in warehouses, powering through sharp turns and bumpy surfaces.
Motor Speed Control
Constant speed no matter the load or slope. PID ramps power on climbs, eases on downhills for safe, steady going.
Robotic Arm Positioning
On AGVs with arms, PID nails precise positioning without shake or overshoot—vital for pick-and-place tasks.
Self-Balancing Robots
Balancing acts like inverted pendulums demand lightning PID loops (often >100Hz) for tiny wheel tweaks against gravity.
Frequently Asked Questions
What distinguishes PID from simple On/Off control?
Bang-bang (on/off) blasts full power or zilch, making the robot zigzag wildly. PID doles out variable power for smooth curves and error-matched fixes—faster, steadier runs.
Why does my robot oscillate (wobble) heavily?
Wobbling screams high Proportional gain (Kp). Robot overcorrects past the line, then back. Dial down Kp or amp Derivative (Kd) to smooth it out.
What’s 'Integral Windup' and how to beat it?
Windup hits when errors pile up big-time (say, robot's stuck), ballooning the I term. Block clears? Massive overshoot. Clamp the I max or reset it when error hits zero.
Gotta use all three—P, I, D—every time?
Nah. Simple line followers thrive on PD alone. Add Integral only for stubborn steady-state errors, like always veering left from mechanical quirks.
How fast should my PID loop run?
Loop way faster than your robot's mechanics respond. 50-100Hz works for most AGVs; speed demons like balancers might need 1kHz+.
What is the Ziegler-Nichols tuning method?
Ziegler-Nichols is a smart tuning trick: Zero I and D, ramp P to steady oscillation, then math out ideal Kp, Ki, Kd from that ultimate gain and period.
How does sensor noise affect the Derivative term?
D's picky about noise since it tracks change rates—spikes trigger motor spasms. Always run sensor data through a moving average filter first.
Can I implement PID on an Arduino or ESP32?
Totally. Arduinos and ESP32s chew through PID float math no sweat. Plus, solid libraries like Arduino PID make it dead simple.
What’s “Derivative Kick” and how do I dodge it?
Derivative Kick hits when you instantly change the Setpoint, spiking the error derivative huge. To avoid it, just calculate the derivative from the Process Variable (your sensor reading) instead of the Error.
Is PID suitable for non-linear systems?
PID is a linear controller. It’s awesome for keeping an AGV on a line (pretty linear stuff), but it can struggle with super non-linear or unpredictable systems. For those complex dynamics, you might need advanced options like Model Predictive Control (MPC).
How do I map PID output to motor speed?
The PID output typically gets added to the left motor speed and subtracted from the right (or the other way around). Always clamp those final motor values to your hardware’s PWM range (like 0-255) to avoid nasty logic glitches.
Does battery voltage affect PID performance?
Yep. As battery voltage drops, motors give less torque for the same PWM, messing with the system’s “gain.” Fancy drivers handle voltage compensation, but otherwise, re-tune or bump up those P-gains a bit as the battery fades.