Odometry Calculation
Odometry is the basic way robots figure out how their position changes over time using motion sensors. By blending wheel speeds and steering angles, AGVs track their path from the start with impressive accuracy.

Core Concepts
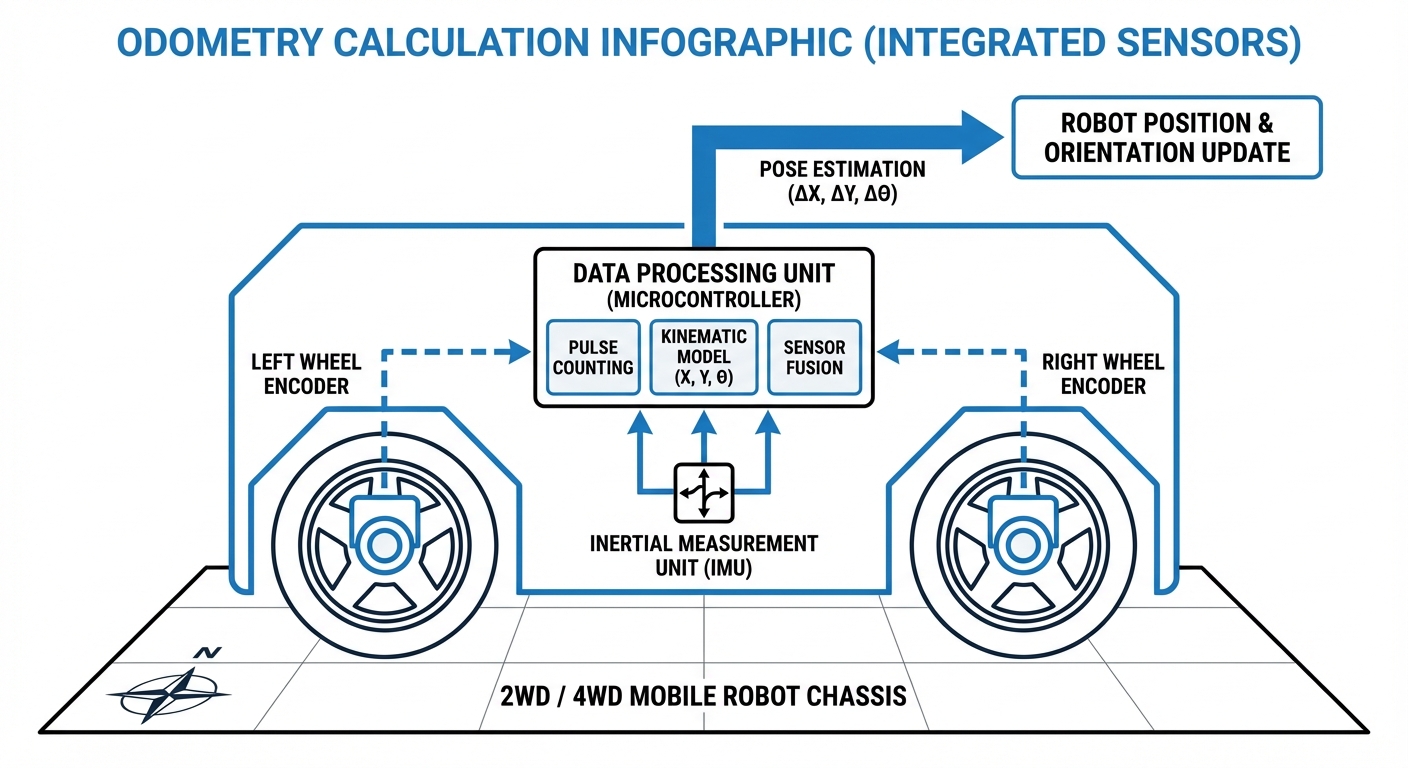
Wheel Encoders
Rotary encoders hook onto wheel motors to count rotations. Those raw ticks turn into straight-line distances and turning speeds for all the math.
Kinematic Models
Kinematic models capture the robot's real-world limits with equations. Think Differential Drive for two-wheeled bots or Ackermann for car-style steering.
Dead Reckoning
Dead reckoning: figuring your spot now based on your last known position. It's key, but errors build up over distance.
Heading (Theta)
A robot's heading ($ \theta $) matters just as much as X and Y coords. Tiny heading mistakes snowball into big side-to-side drifts.
Sensor Fusion
Sensor fusion: pairing wheel odometry with IMUs (Inertial Measurement Units) to fix wheel slip and keep tracking solid on bumpy floors.
Error Propagation
Grasping how tiny measurement glitches grow over time. Today's algorithms use covariance matrices to gauge position confidence.
How It Works
Odometry integrates velocity readings over tiny time slices ($\Delta t$). For differential drive bots, we track left ($v_L$) and right ($v_R$) wheel speeds separately.
The robot's straight-line speed ($v$) averages the wheels, while spin rate ($\omega$) comes from their difference divided by wheelbase.
Basic trig updates the position vector $[x, y, \theta]$. Add displacement ($v \cdot \cos(\theta)$ and $v \cdot \sin(\theta)$) to the old coords. This loop keeps the AGV oriented to its origin.
Real-World Applications
Warehouse Logistics
AGVs lean on odometry to zip between warehouse racks where GPS flakes out. It connects the dots between QR codes or LiDAR checkpoints.
Automated Manufacturing
Mobile manipulators need pinpoint odometry to line up with conveyor belts and stations, nailing sub-centimeter handoffs.
Healthcare Delivery
Hospital service robots use odometry to roam endless halls on their own, dropping off linens and meds without a human guide.
Clean Room Operations
In sterile zones where floor markers are a no-go, precise wheel odometry handles local navigation like a champ.
Frequently Asked Questions
What causes odometry drift in AGVs?
Drift stems from systematic slip-ups (wrong wheel diameter or wheelbase calcs) and random ones (skids on slippery floors, rough ground). These add up, pulling the estimated position away from the truth.
How is odometry different from SLAM?
Odometry gives you a quick, local estimate of position relative to where you started—super fast, but it drifts over time. That's where SLAM (Simultaneous Localization and Mapping) comes in: it taps external sensors like LIDAR or cameras to spot landmarks, fix that odometry drift through loop closure, and deliver a true global absolute position.
What is the role of an IMU in odometry?
An IMU delivers angular velocity data straight from its gyroscopes. Fuse that with wheel encoder readings (usually via an Extended Kalman Filter), and you get a far more accurate heading—especially helpful when wheels slip during turns.
How often should odometry be calculated (Update Rate)?
For buttery-smooth navigation and control loops, run odometry at 50Hz to 100Hz (every 10-20ms). Go slower, and you'll see jagged path estimates with sluggish control; push higher, and you might overload the processor without real gains.
Does tire wear affect odometry calculations?
Yep, it makes a big difference. Tires wear down and shrink in diameter, so the robot calculates more distance traveled than actual since it assumes a fixed size. Regular recalibration of wheel diameter params is a must.
What is the difference between differential and Ackermann odometry?
Differential odometry works off the speed difference between two parallel drive wheels, tank-style. Ackermann odometry fits car-like vehicles, factoring in front-wheel steering angle and rear-wheel velocity with tailored kinematic equations.
Can odometry work on 3D terrain (ramps)?
Standard 2D odometry assumes a flat plane ($x, y, \theta$). Hit a ramp, and the slope distance is longer than the map's horizontal projection. Skip 3D IMU for pitch correction, and your X/Y coords on inclines will be way off.
How do we calibrate odometry parameters?
Calibration usually means the 'UMBmark' test or similar: roll the robot in squares a few times. Measure the final offset from start, then math out corrections for wheel diameter and wheelbase.
What encoder resolution is recommended?
Higher is better overall, but 500 to 2000 ticks per revolution nails it for industrial AGVs. Too low, and low-speed quantization errors make velocity jumpy, throwing off precise docking.
Is Visual Odometry better than Wheel Odometry?
Visual Odometry (via cameras) shrugs off wheel slip but needs decent lighting and texture. Wheel odometry holds up in blank corridors or the dark. Smart systems blend both for top reliability.