Motion Profiling
Turn raw motor commands into fluid, precise kinematics. Motion profiling crafts smooth velocity and accel curves so your AGVs tackle dynamic spaces with rock-solid stability, efficiency, and laser accuracy.

Core Concepts
Kinematic Constraints
Setting the robot's physical boundaries—like max velocity, acceleration, and deceleration—to dodge mechanical strain or traction loss.
Trapezoidal Profile
The basic velocity profile: steady ramp-up, constant cruise, steady slowdown for slick point-to-point hauls.
S-Curve Profiling
Pro-level smoothing that caps 'Jerk' (acceleration's change rate). Essential for fragile loads like liquids or stopping heavy AGVs from wheel spin.
Feedforward Control
Feed-forward magic: predicting motor needs from physics models instead of error-chasing, for lag-free motion.
Time Discretization
Slicing the path into millisecond setpoints for motor controllers to nail in real-time loops.
Multi-Axis Sync
Syncing linear and rotational moves (holonomic or differential) to start and finish spot-on for tricky curves.
How It Works
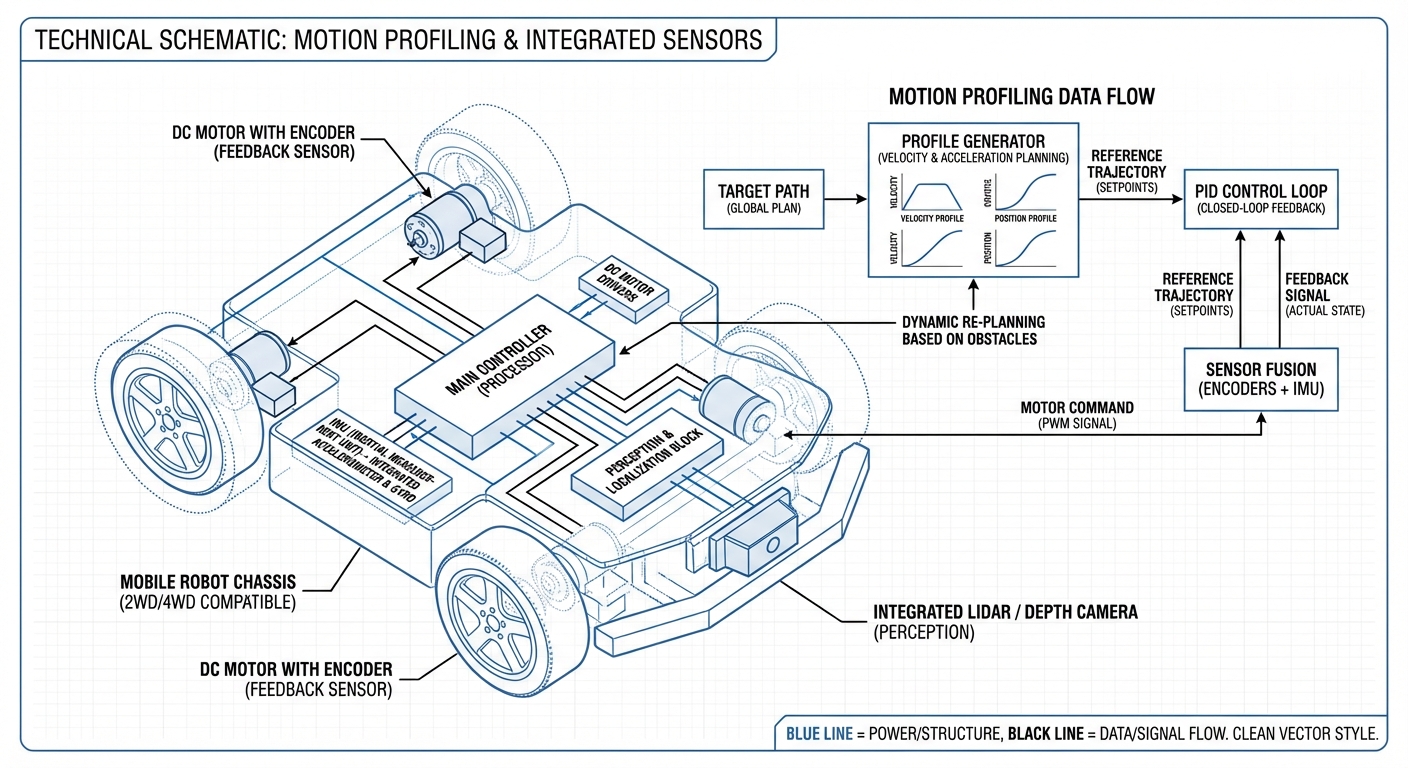
At its core, motion profiling is a mathematical negotiation between what you the robot to do and what physics it to do. Instead of simply telling a motor to go to position X, the profiler calculates the entire journey before the wheels even turn.
Grab the target distance, layer on constraints: max velocity (V-max), acceleration (A-max), jerk (J-max). Then it spits out setpoints—every 10ms or 20ms—pinning exactly where the robot should be at that instant.
Feed those setpoints to the PID. Since the path's physics-realistic, errors stay tiny for ultra-smooth motion that saves battery and cuts wear on AGV gearboxes.
Real-World Applications
High-Speed Intralogistics
In jammed warehouses, Kiva-style bots use trapezoidal profiling to max throughput—blasting to top speed on straights and braking dead-on to picks, trimming ms off every run.
Medical Transport
Hospital AGVs carting blood or meals lean on S-Curve profiling. Jerk limits prevent spills or jolts, even dodging hallway surprises.
Heavy Payload Manufacturing
AMRs hauling multi-ton chassis in auto plants use motion profiling to tame inertia. It nails braking distances for smooth, safe stops—not disasters.
Precision Assembly
Robotic arms and mobile manipulators rely on synchronized multi-axis profiling to line up parts with sub-millimeter precision, letting them automatically mate components even as the base settles.
Frequently Asked Questions
What's the difference between Motion Planning and Motion Profiling?
Motion Planning (or Path Planning) figures out to go to dodge obstacles (like A* or RRT algorithms). Motion Profiling handles to travel that path over time, computing exact velocities and accelerations for smooth, realistic motion.
Why should I use S-Curve over Trapezoidal profiling?
Trapezoidal profiles make instant acceleration jumps, causing infinite jerk—and that means wheel slip, vibrations, and extra wear. S-Curve profiling smoothly ramps accel up and down, protecting your gearbox and improving traction, even if it takes more computing muscle.
How does payload weight affect motion profiling parameters?
Ideally, profiling params like max accel/decel should adapt on the fly. A loaded AGV has way more inertia, needing softer acceleration and longer braking than an empty one. Advanced setups tweak these limits in real-time using current load estimates.
Does motion profiling replace PID control?
No, they team up nicely. Motion profiling sets the 'Feedforward' ideal trajectory—what the robot should be doing. PID acts as 'Feedback,' fixing tiny errors from friction, gravity, or rough ground to stay on that path.
What hardware requirements are necessary for effective profiling?
You need high-res encoders for spot-on position feedback and a microcontroller that crunches floating-point math in a 50-100Hz control loop. Slow loops lead to choppy, 'stair-stepped' motion instead of silky smooth.
How do you handle dynamic obstacles during profile execution?
If an obstacle pops up, interrupt the profile immediately. Trigger a separate 'E-stop' or 'fast-stop' profile to brake as hard as physics allows. Once clear, replan a new profile from your current position to the goal.
Can motion profiling help with battery life?
Yes, a ton. By skipping harsh start/stop current spikes and smartly using coasting, it cuts motor heat loss, optimizes energy use, and stretches your fleet's runtime per charge.
What is the "following error" and why does it matter?
Following error is the gap between the profiled target position and the actual encoder reading right then. Watch it closely—a growing error signals a stall, slip, or overly aggressive profile for your hardware.
Does this work with non-holonomic drives (like Ackerman steering)?
Yes, but the math gets trickier. For Ackermann (car-like) steering, profiles respect the min turning radius. The profiler creates a path (often splines) and calculates the linear velocity and steering rates to follow that curve.
What’s the impact of loop latency on motion profiling?
Latency wrecks smooth motion. Late commands mean controllers use outdated info, sparking oscillations. Stick to deterministic protocols like EtherCAT or CAN bus so profile setpoints hit exactly on time.