Modbus Protocol
The go-to industrial standard linking mobile robotics worlds. Modbus is the trusty backbone for AGV fleets, smoothly swapping data between PLCs, sensors, and fleet HQ to keep ops rolling.

Core Concepts
Client/Server Model
Ex-Master/Slave setup for data flow. Fleet Manager (Client) pings for status; AGV (Server) replies with position, battery, etc.
Modbus TCP/IP
The robotics modernizer. It wraps Modbus in TCP/IP for reliable Wi-Fi comms.
Registers & Coils
Your data blueprint. Coils for binaries (stopped/moving), Holding Registers for the good stuff like X/Y, speed, payload.
Latency Management
Key for mobile bots. Modbus stays lean, delivering near-real-time commands for safe nav.
Error Checking
CRC checks every packet. Bad data from noise? Tossed, no weird robot antics.
Integration Ease
Open-source, everywhere. Our bots plug straight into warehouse gear—elevators, conveyors—no custom gateways.
How It Works
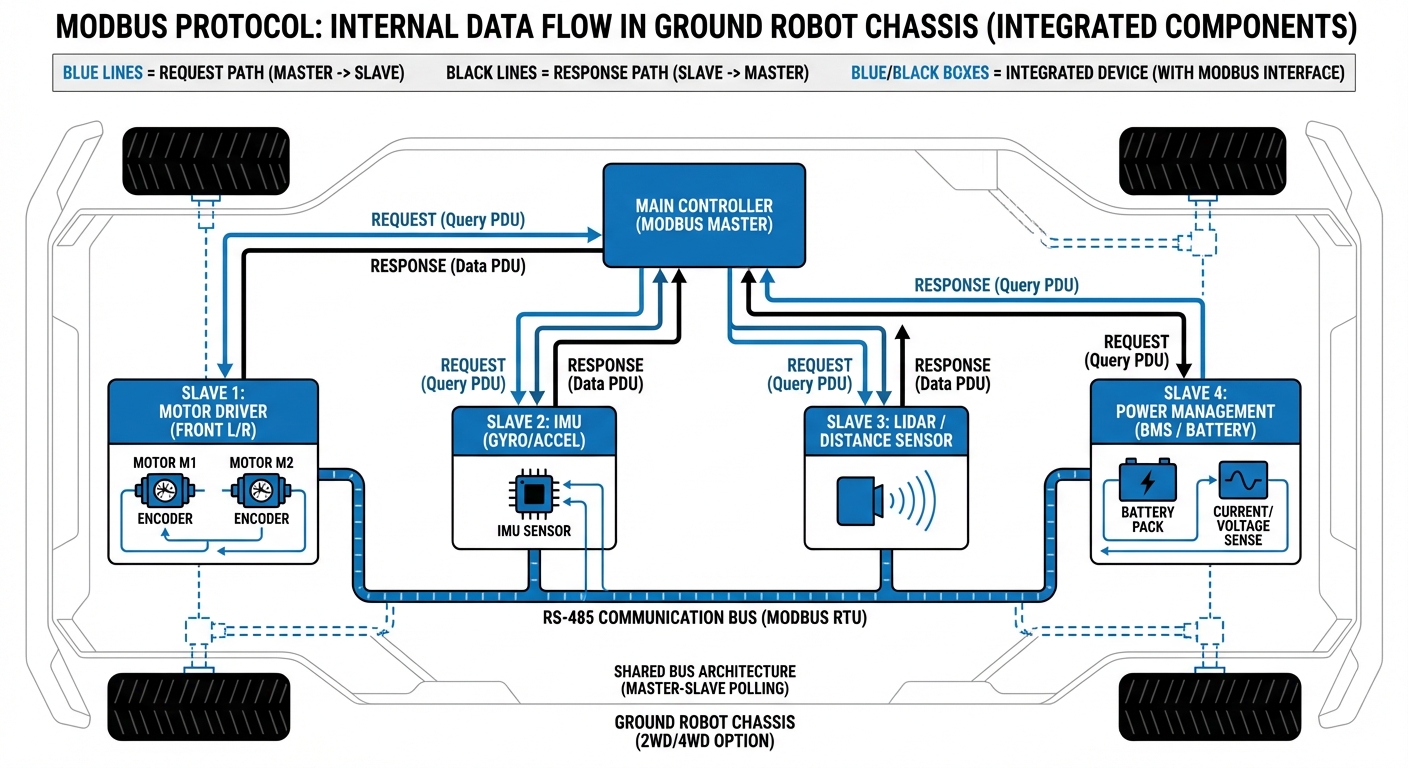
In mobile robotics, Modbus bridges hardware and control software. It starts with the sending a request frame to a specific Robot ID.
The AGV gets it over TCP/IP (Wi-Fi) or RTU (RS485 inside). It reads the function code—like 'Read Holding Registers'—to fetch battery % or errors.
Finally, the robot shoots back the requested data. This whole loop repeats in mere milliseconds, forming a nonstop cycle of feedback and control that enables spot-on fleet coordination and lightning-fast reactions to changes in the environment.
Real-World Applications
Facility Integration
AGVs use Modbus to chat with automatic doors and elevators. As a robot nears a door, it writes a '1' to a specific coil address, triggering the door to open smoothly and letting the robot glide through without a hitch.
Battery Management Systems (BMS)
Inside AGVs, Modbus RTU handles communication to keep an eye on cell voltages and temperatures. The controller reads these registers to figure out when it's time to head back to the charging station on its own.
Production Line Handshakes
In manufacturing setups, conveyor belts talk to AGVs via Modbus. The belt signals 'Ready to Unload', and the robot confirms 'In Position' before they hand off the load.
Hybrid Fleet Orchestration
Modbus is like the universal language that lets robots and PLCs from different brands play nice together. Central systems compliant with VDA 5050 often wrap Modbus commands to boss around all kinds of hardware.
Frequently Asked Questions
What is the difference between Modbus RTU and Modbus TCP for AGVs?
Modbus RTU runs on serial connections like RS-232 or RS-485, making it perfect for internal robot parts such as motor drivers or sensors. Modbus TCP wraps the data in Ethernet packets, ideal for wireless chats between the AGV and the central fleet manager.
Why is Modbus still used in modern robotics instead of newer protocols like MQTT?
MQTT shines for cloud connections, but Modbus is still king for local, real-time control thanks to its dead-simple design, zero bloat, and rock-solid support across old-school industrial gear like PLCs and door controllers in warehouses.
How does an AGV handle Modbus communication loss?
Safety comes first. If the 'heartbeat' signal—a register that keeps updating—from the Fleet Manager goes quiet via Modbus for too long (say, 500ms), the AGV hits the E-Stop or shifts to a safe idle mode right away.
What is the maximum number of AGVs manageable via Modbus?
Modbus supports up to 247 devices per network segment. In TCP/IP setups, it's more about your network bandwidth and server muscle, easily handling hundreds of robots with solid architecture.
Can Modbus transmit video or mapping data?
No. Modbus is built for control data like bits and integers, not huge blobs. Stuff like LIDAR clouds or camera feeds goes over ROS topics or HTTP/RTSP streams, while Modbus sticks to the navigation commands.
How secure is Modbus for industrial robots?
Standard Modbus skips built-in encryption or authentication. For secure AGV fleets, tunnel Modbus TCP over VPN, use VLANs to segregate robot traffic, or go with Modbus Security—the newer, locked-down version.
What are the typical hardware requirements to implement Modbus on a robot?
Super minimal. Any microcontroller like Arduino or ESP32, or industrial PCs like Raspberry Pi or IPCs with serial or Ethernet ports, can run it. Most PLCs have it baked in.
How do we map AGV functions to Modbus registers?
This is spelled out in the robot's Interface Control Document (ICD). Often, registers 40001-40010 hold X/Y positions, 40011 shows battery level, and Coils 0001-0005 trigger basics like 'Lift Up' or 'Reset Alarm.'
Is Modbus affected by electrical noise in factories?
Modbus RTU over RS-485 laughs off noise thanks to differential signaling. Still, in spots with big motors, proper shielding and grounding are key to avoiding corrupted packets.
Can we control AGV speed dynamically via Modbus?
Yes. There's usually a Holding Register for 'Target Speed.' Write a value like 50 (for 0.5m/s), and the central system can dial down robots in busy areas on the fly.
What is the typical polling rate for an AGV fleet?
For nav and traffic, 10-20Hz (every 50-100ms) is the sweet spot. It balances network strain with the detail needed for buttery-smooth control.
How do I troubleshoot a Modbus connection failure?
Start with ping to check IP connectivity. Then grab Modbus scanner software to read a known register. Hunt for Slave ID mismatches, wrong baud rates (RTU), or blocked port 502 (firewalls).