I2C Interface
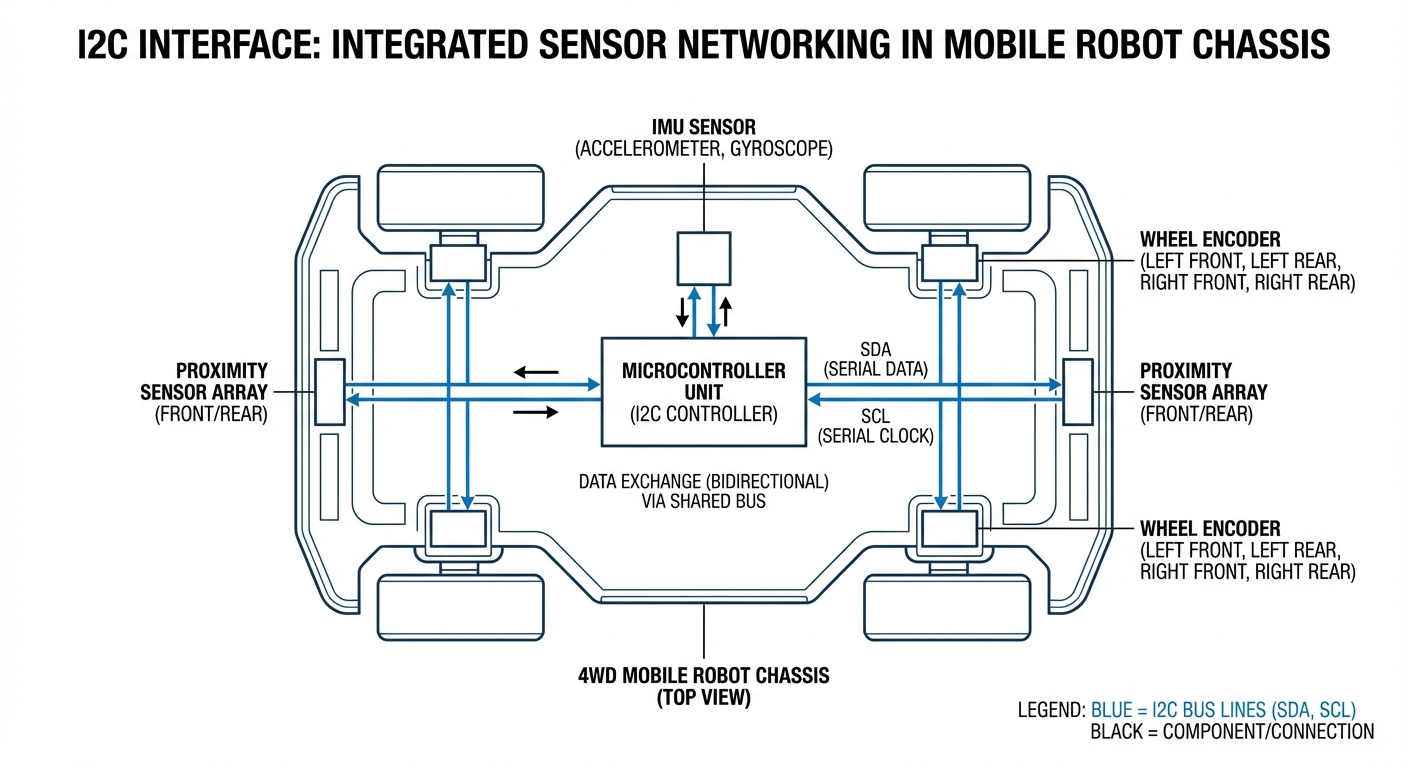
The Inter-Integrated Circuit (I2C) protocol is the go-to for internal chit-chat in modern AGVs. It lets microcontrollers swap data seamlessly with tons of sensors using just two wires, slashing wiring headaches in mobile robots.

Core Concepts
Master-Slave Architecture
One device—the Master/Controller—kicks off all the talking, managing the clock and data flow to Slave devices (like sensors or drivers).
SDA & SCL Lines
It runs on just two wires: Serial Data (SDA) for two-way info and Serial Clock (SCL) to keep bits in sync.
Unique Addressing
Every device gets a unique 7-bit or 10-bit address, so up to 127 can share the same wires without clashing.
Synchronous Protocol
Unlike UART, I2C is synchronous—the master clocks out the bits, locking in data reliability.
Open-Drain Design
Lines are "open-drain": devices pull low for 0 and float high for 1, avoiding shorts if two try talking at once.
Multi-Master Support
Fancy setups can have multiple masters on one bus, great for robotic designs where CPUs share sensors.
How It Works
At the hardware level, add two pull-up resistors to hold lines high when idle. Chat starts with the Master pulling SDA low while SCL stays high—the special "Start Condition" that wakes everyone up.
The Master sends the target's 7-bit address plus a Read/Write bit. Each byte gets an ACK from the receiver. Want gyro data on your AGV? Address the gyro, send the register, and it sends back the info.
It wraps up with a "Stop Condition" (SDA rising while SCL is high). This tight structure makes I2C super reliable for onboard diagnostics and tweaking robot peripherals.
Real-World Applications
IMU & Navigation
I2C is standard for IMUs (accelerometers/gyros). AGVs use fast I2C (400kHz+) to grab orientation for dead-reckoning nav.
Battery Management Systems (BMS)
Smart batteries tap I2C (often SMBus) to share charge level, voltage, and temp data with the robot brain.
Environmental Sensing
Internal temp sensors, humidity monitors, and ultrasonic rangefinders usually run I2C, so one microcontroller can track the robot's vitals.
OLED & LCD Displays
Little diagnostic screens on the AGV for operators often use I2C too, minimizing wires through chassis hinges.
Frequently Asked Questions
What's the max distance for an I2C bus on an AGV?
I2C's built for short hops between boards—under 1 meter usually. On big robot chassis (over 1-2m), capacitance messes up signals. For longer runs, add I2C buffers or switch to CAN or RS485.
How does I2C compare to SPI for robot sensors?
I2C sticks to 2 wires no matter how many devices, keeping wiring simple, but it's slower (100kHz standard, 400kHz fast). SPI flies at MHz for cameras, but needs 4 wires + a Chip Select per device, wiring nightmare.
What happens if two devices have the same I2C address?
Bus conflict—both yell at once, data gets garbled. Fix it with an I2C multiplexer (TCA9548A) for separate lanes, or tweak one device's address via pins if possible.
Why do I need pull-up resistors?
I2C devices are "open-drain"—they sink to ground for 0 but can't source high. Add external pull-ups (4.7kΩ or 10kΩ) to yank lines to 3.3V/5V when idle.
Can I mix 3.3V and 5V devices on the same I2C bus?
Not straight-up—risk frying your 3.3V controller with a 5V device. Use a bidirectional Logic Level Converter to safely link them while keeping I2C's two-way flow.
Is I2C susceptible to motor noise in AGVs?
Yes, single-ended I2C picks up EMI from motors. Dodge it with short wires, twisting SDA/SCL with ground, shielded cable, and distance from power lines.
What is "Clock Stretching"?
Clock stretching lets slow slaves hold SCL low, making the master pause. Handy for sensors needing processing time, but not every master plays nice with it.
How many devices can I actually connect?
Theoretically 127 (7-bit addresses). Real-world limit is bus capacitance (400pF max)—more devices soften edges, causing errors. Stick to 5-10 per bus on AGVs.
How do I troubleshoot a locked-up I2C bus?
Slaves can jam SDA low. Clear it by clocking SCL 9 times or power cycling. Oscilloscope or logic analyzer spots stuck lines best.
Is I2C hot-swappable?
Standard I2C isn't hot-pluggable—live inserts glitch the bus. For tool-changing bots, grab hot-swap I2C buffers.
What is the "Repeated Start" condition?
You use a Repeated Start when the master needs to switch from writing to reading (or vice versa) without releasing the bus to other masters. It's crucial in multi-master setups to keep operations atomic, like reading a sensor register right after selecting it.
What tools can I use to debug I2C on a Linux-based AGV?
On Linux systems like Raspberry Pi or Nvidia Jetson, the `i2c-tools` package is a must-have. Use `i2cdetect` to scan the bus for active addresses, and `i2cget` or `i2cset` to read or write registers and test connectivity.