Forward Kinematics
Forward Kinematics is the math powerhouse that converts internal joint data—like wheel speeds and steering angles—into spot-on position and orientation. It's the key algorithm letting AGVs pinpoint their place in the world using only onboard sensors.

Core Concepts
The Robot Frame
Grasp the robot's local coordinate system (X, Y, Z). That's the starting point for all sensor data before shifting it to the global map.
Transformation Matrices
The transformation matrices that crunch the end-effector or chassis position and orientation relative to the base frame.
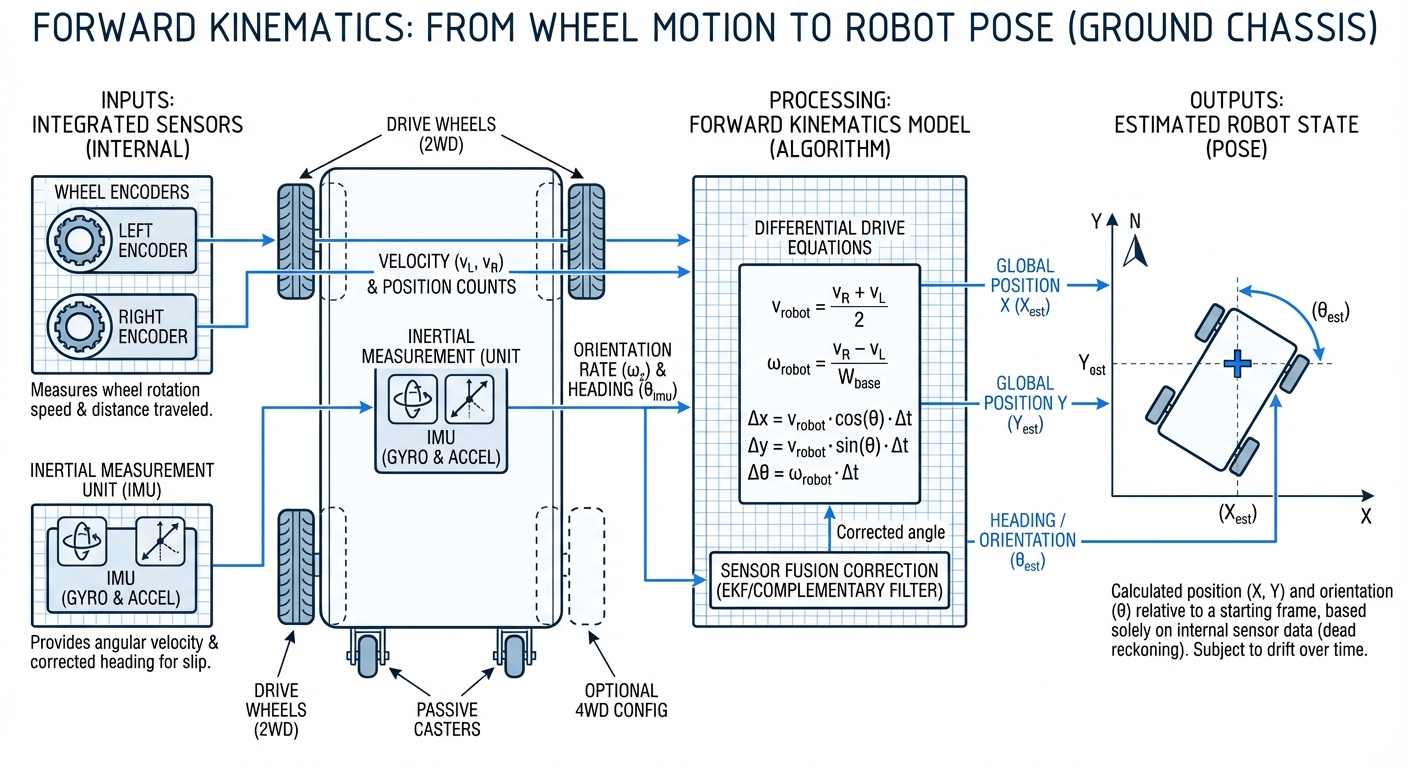
Wheel Odometry
Rotary encoders track wheel rotations, feeding raw counts into kinematic equations for mobile robots.
Pose Estimation
Computing the robot's exact state, usually (x, y, θ) for 2D position and heading.
Differential Drive
The smarts behind 2-wheel drive robots, where steering happens by tweaking left and right wheel speeds independently.
Dead Reckoning
Figuring current position by taking a known starting point and layering on speed estimates over time.
How It Works
In mobile robotics, Forward Kinematics bridges hardware and mapping software. It grabs robot geometry (wheel radius, wheelbase) and wheel velocities to figure out velocity in the global frame.
For a typical differential drive AGV, it integrates velocity over tiny time steps. Pull linear velocity (v) and angular velocity (ω) from left/right wheel speeds, then update global X, Y, and Theta (heading).
Sure, it's powerful, but Forward Kinematics hinges on flawless wheel-ground traction. Skip external fixes like LiDAR or cameras, and slippage errors pile up into 'drift'—tackled by sensor fusion.
Real-World Applications
Warehouse Logistics
AGVs lean on forward kinematics for short hops between QR code checkpoints, keeping smooth paths for pallet shuttling between shelves—no need for finicky indoor GPS.
Precision Manufacturing
On assembly lines, mobile manipulators use kinematic math to nail docking at workstations, positioning the chassis perfectly for the arm to grab the workpiece.
Hospital Delivery Bots
Hospital bots delivering linens or meds use kinematics to cruise long halls, nail tight turns around obstacles, and stay safe in busy human zones.
Agricultural Robotics
Field robots tap kinematic models to handle bumpy terrain, factoring in wheel slip on mud when GPS gets blocked by trees or buildings.
Frequently Asked Questions
What is the difference between Forward and Inverse Kinematics?
Forward Kinematics figures position and orientation from joint/wheel inputs. Inverse Kinematics flips it: starts with a target spot and solves for the wheel speeds or angles to get there.
Why does Dead Reckoning drift over time?
Dead reckoning runs on internal sensors (odometry) alone. Tiny glitches like wheel slip, bumpy floors, or tire squish add up. Since forward kinematics integrates over time, those errors snowball, drifting your position estimate away from reality.
How does wheel configuration affect the kinematic model?
The equations shift a lot by drivetrain. Differential drive (2 wheels) is straightforward non-holonomic. Mecanum or omni-wheels need fancy vector math for full X, Y, and Theta motion (holonomic).
Can Forward Kinematics work without encoders?
Nope, not really. Encoders give raw wheel-turn data—without it, no sense of self. Visual odometry (cameras) or IMUs can sub in for advanced setups, but they track motion differently.
What is the role of the Jacobian matrix?
The Jacobian matrix ties joint velocities (wheel speeds) to the robot's linear and angular speeds in the global frame. Crucial for spotting singularities and linking internal to external motion.
How do we correct kinematic errors in real-time?
We blend it with Sensor Fusion via an Extended Kalman Filter (EKF). The EKF merges forward kinematics estimates with hard position fixes from LiDAR, cameras, or GPS to lock the robot onto its true spot.
Does tire wear affect forward kinematics?
Yes. Kinematic math assumes a fixed wheel radius. Worn tires shrink it, so the robot underestimates distance per turn—recalibrate that parameter regularly in software.
What is the impact of integration methods (Euler vs. Runge-Kutta)?
Basic Euler integration assumes steady velocity between steps—super fast but not precise. Runge-Kutta (like RK4) boosts accuracy by checking velocity multiple times per step, cutting errors in wild maneuvers.
How is the Instantaneous Center of Rotation (ICR) used?
In turning non-holonomic robots, the ICR is the instant pivot point. Spotting it nails kinematic constraints and keeps wheel speeds matched to rigid-body motion, dodging drag.
Is 3D Kinematics necessary for warehouse AGVs?
Usually not. Warehouse floors are flat, so 2D (X, Y, Theta) works fine. Go 3D (X, Y, Z, Roll, Pitch, Yaw) for outdoor bots or drones tackling big elevation shifts.