Force-Torque Sensors
Force-Torque (F/T) sensors are the 'nervous system' for mobile manipulators and AGVs, delivering real-time feedback on all six degrees of freedom so robots can truly 'feel' their world for safe teamwork and precise work.

Core Concepts
6-Axis Measurement
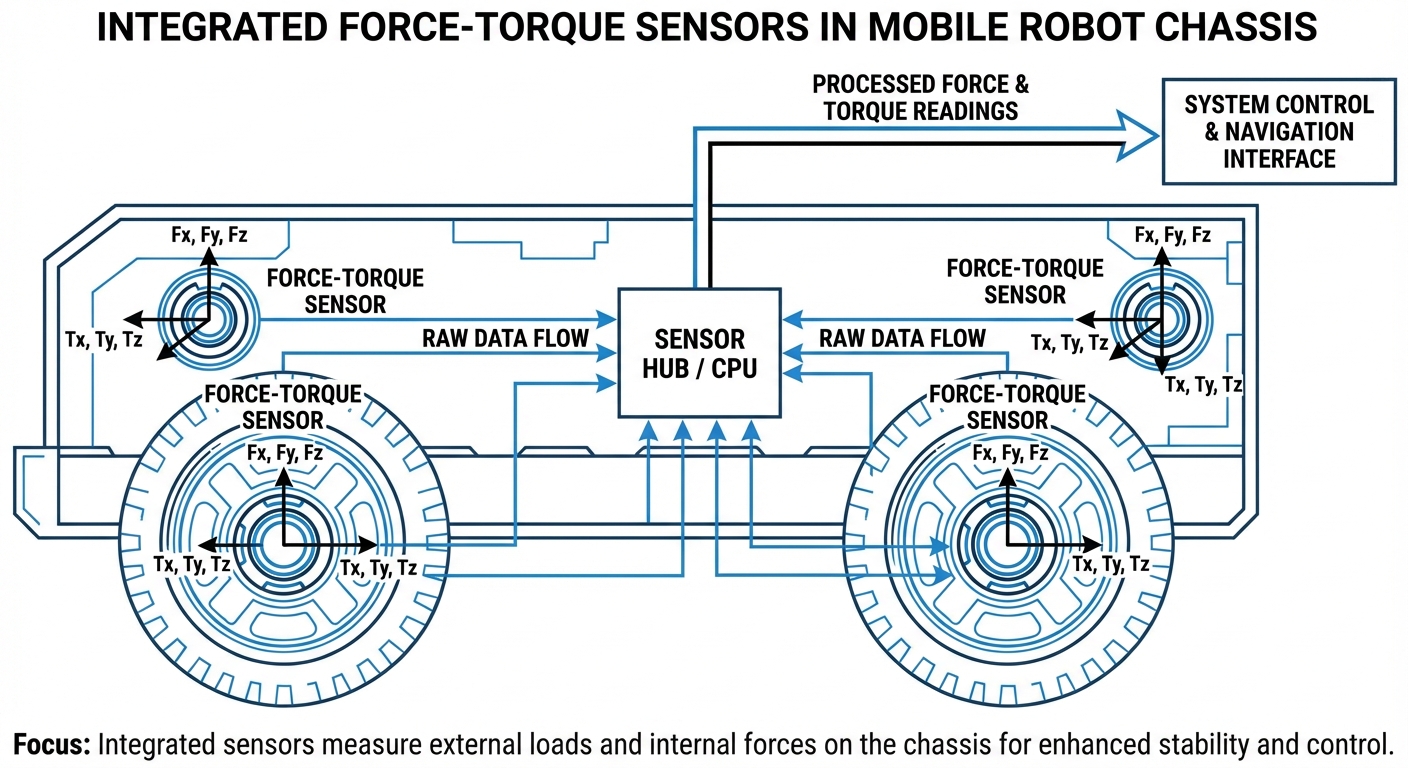
They measure forces (Fx, Fy, Fz) and torques (Tx, Ty, Tz) all at once, giving the full picture of contact force and twist.
Strain Gauge Tech
Strain gauges—metallic foils glued to a flexy structure—change resistance under load, turning into digital force readouts.
Compliance Control
Unlocks "active compliance," where the robot eases up on stiff joints against surfaces to avoid damage.
Collision Detection
Way more sensitive than motor current checks. F/T sensors catch surprise bumps instantly for emergency halts.
Digital Signal Processing
Built-in electronics scrub noise and temp drift, sending clean data over EtherCAT, Modbus, or CAN straight to the controller.
Zero Gravity Mode
Makes hand-guiding a breeze for programming—the sensor feels your push and the robot follows intuitively.
How It Works
Force-Torque sensors sit between the robot flange and gripper. They’re tough housings with strain gauges in a Wheatstone bridge. Loads on the tool cause tiny flexes.
That flex tweaks gauge resistance. Electronics amp it up, filter junk, and spit out a digital matrix for forces (X, Y, Z) and torques around them.
In AGV manipulation, it’s pure feedback magic. Say inserting a battery: F/T keeps force under limits, tweaking path in milliseconds for perfect alignment.
Real-World Applications
Precision Assembly
Mobile manipulators lean on F/T for "search and insert" like finding screw holes or snapping connectors—even if vision’s blocked.
Sanding & Polishing
Robots hold steady force on bumpy surfaces. Sensor loops adjust Z-depth live for even results, no matter the curves.
Palletizing & Stacking
Spot the exact second a box kisses the pallet. Ditches fixed heights, auto-handles squished or wonky stacks.
Medical Robotics
In hospital logistics AGVs or surgical assistants, F/T sensors deliver the fine-tuned sensitivity needed to gently handle biological samples or interact with patients without risking too much pressure.
Frequently Asked Questions
What’s the difference between a 3-axis and a 6-axis sensor?
A 3-axis sensor focuses on linear forces only (Fx, Fy, Fz). A 6-axis sensor adds rotational moments (torques: Tx, Ty, Tz) to the mix. They’re crucial for intricate tasks where robots need to sense leverage and twists.
How does an F/T sensor improve AGV safety?
Standard AGVs use LiDAR for navigation safety, but that leaves the robotic arm blind to collisions. F/T sensors bring 'Power and Force Limiting' (PFL) to the rescue – they spot force spikes from bumping a human or obstacle and stop the robot instantly, beating motor-current detection every time.
What is impedance control vs. admittance control?
These are smart control strategies powered by F/T data. Impedance control lets the robot behave like a spring-damper setup, shifting position based on applied force. Admittance control reads the force and sets a velocity target. You’ll see admittance on stiff industrial bots, while impedance shines with lightweight cobots.
How often do F/T sensors need calibration?
Most modern optical or strain-gauge sensors come factory-calibrated for life. Still, it’s smart to 'zero' them via software at the start of each task to offset the end-effector’s weight (like a gripper). Recalibration? Only after a major crash or overload.
Are capacitive or optical sensors better than strain gauges?
Strain gauges rule for toughness and affordability. Optical sensors win on resolution and EMI resistance, perfect for MRI rooms or precision labs. Capacitive ones? Not so great for heavy-duty robotics due to hysteresis woes.
Can F/T sensors handle water and dust?
Absolutely, but check the IP rating first. Plenty of industrial F/T sensors hit IP65 or IP67 – dust-proof and ready for water jets or immersion. Essential for AGVs in wash-down zones or grubby warehouses.
What communication protocols are supported?
EtherCAT, Ethernet/IP, and Modbus TCP lead for real-time industrial control. CAN bus is a fave in mobile robots. For R&D (think ROS setups), USB or Ethernet is the go-to.
How do I choose the right force range (Capacity)?
Figure the static weight of your gripper and payload, plus dynamic forces at max acceleration. Aim for a sensor where your typical load is 40-50% of full scale – great resolution with room for those surprise bumps.
Does the sensor affect the robot's payload capacity?
Yep. The sensor adds weight and nudges the tool flange’s center of gravity forward. Subtract its weight from the robot’s payload rating to see what’s left for gripper and part.
What is "Crosstalk" in F/T sensors?
Crosstalk happens when force on one axis (say, Fx) bleeds into another (like Fy or Tz). Top sensors use calibration matrices to fix this mathematically, keeping it under 1-2%.
Is ROS/ROS2 integration supported?
Usually, yeah. Big makers offer ROS packages that pump out /wrench topics with force and torque data. Slots right into navigation or MoveIt! planning with ease.
What happens if the sensor is overloaded?
Most have mechanical stops for 500-1000% overloads. But a hardcore crash can warp the sensing bits, causing 'zero drift' that software can’t fix.