End Effectors and Grippers
End effectors are the 'hands' of mobile robots, turning basic haulers into smart manipulators. They shape how robots grab, place, and handle stuff in warehouses and factories.

Core Concepts
Mechanical Grippers
The go-to grippers: jaws or fingers that clamp tight, powered electrically or by air for solid holds on sturdy objects.
Vacuum Cups
Perfect for boxes, glass, or plastic in packing—suction cups need a built-in pump or venturi on the robot.
Magnetic Grippers
Great for metal sheets or parts: electromagnets snap on and off fast, skipping fiddly fingers.
Soft Robotics
Soft grippers from squishy silicone that mold to shapes—ideal for breakables, food, or oddballs without damage.
Automatic Tool Changers
Tool changers let AGVs swap grippers solo, so one bot pallets, picks bins, or assembles on the fly.
Force/Torque Sensors
Built-in 'touch' sensors for feedback. Vital in mobile picking where perfect alignment isn't guaranteed.
How It Works
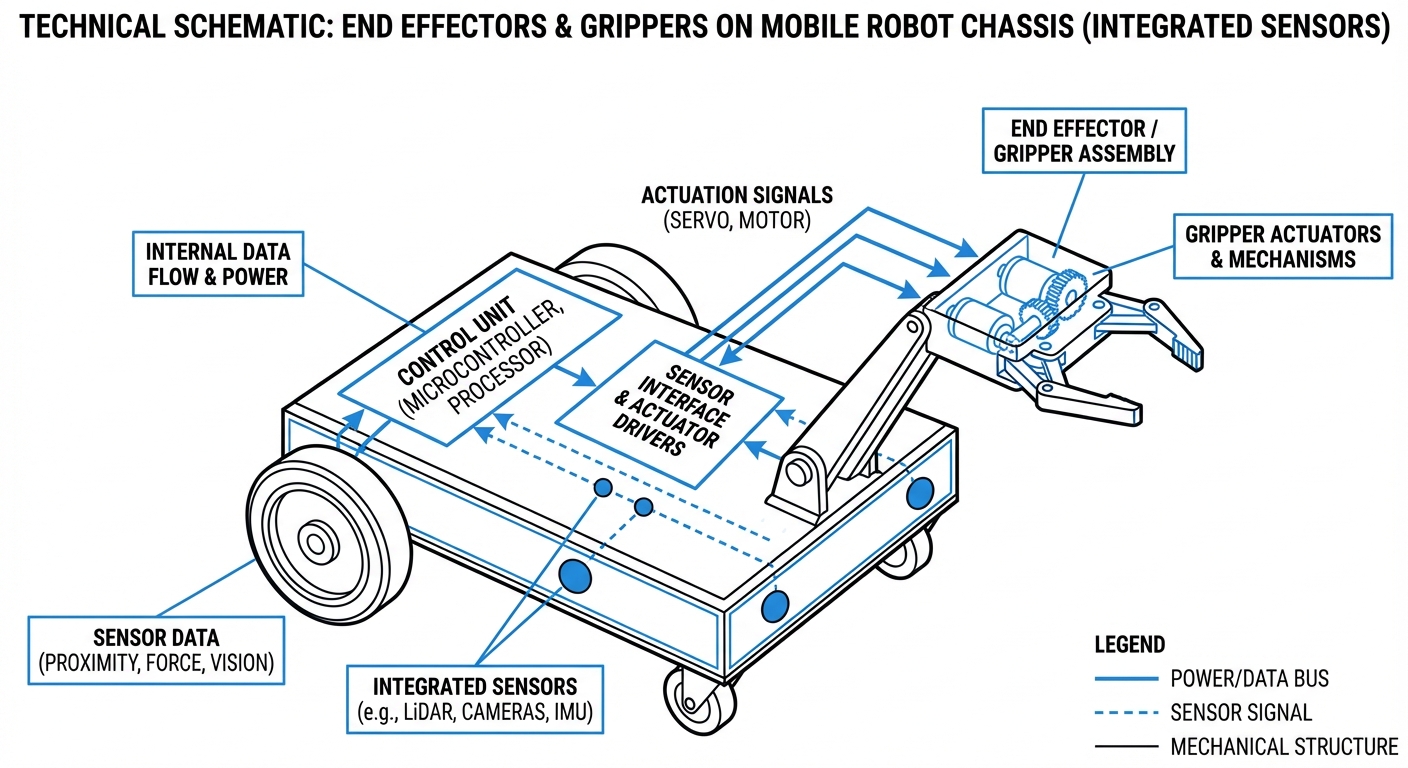
The end effector links the robot's smarts to the real world. On AGVs, it's on an arm or slider off the base, blending mechanics, power, and signals.
Battery-friendly electrics beat pneumatics (no compressors). Vacuum units are standard for logistics.
Protocols like IO-Link, PROFINET, or EtherCAT handle it: AGV sends open/close, gripper reports success, size, and force live.
Real-World Applications
Mobile Bin Picking
AMRs with vision-guided parallel grippers weave aisles, grabbing eaches from bins to build orders.
Machine Tending
In factories, dual-gripper AGVs feed CNCs raw stock and yank parts out in one go, slashing downtime.
Laboratory Automation
Precision electric grippers on mobile bases delicately manage biotech vials and plates, with force tweaks to avoid squishing samples.
End-of-Line Palletizing
Heavy-duty vacuum or clamping effectors on high-reach AGVs stack boxes right onto pallets. These systems smartly adjust their grip based on the box's weight and dimensions.
Frequently Asked Questions
What's the difference between an end effector and a gripper?
An end effector—also called End-of-Arm Tooling or EOAT—is just a catch-all term for any tool attached to the end of a robot arm to interact with its surroundings. A gripper, though, is a specific kind of end effector built to grab and hold objects. You’ve got others like welding torches, screwdrivers, or dispensing nozzles too.
Are electric or pneumatic grippers better for AGVs?
Electric grippers are usually the go-to for AGVs and AMRs. They’re more energy-efficient, give you precise control over position and force, and skip the need for lugging around a heavy air compressor or hunting for air drops. Pneumatic grippers? They’re better for stationary setups or when you need a super high power-to-weight ratio.
How do I figure out the required payload capacity for a gripper?
Add up the weight of the object you're lifting plus the gripper's own weight for the total payload. Then factor in acceleration forces from the AGV's movement (that's inertia) and the friction between the gripper fingers and the object. It's standard to apply a safety factor of 2x or 3x.
Can one gripper handle multiple product types (high-mix)?
Absolutely—adaptive grippers, like those with 2 or 3 fingers and long strokes, can manage all sorts of part sizes. Or, go with automatic tool changers so your AGV can swap out grippers completely for different jobs. Soft robotic grippers shine in high-mix situations with irregular shapes too.
What safety considerations exist for grippers on mobile robots?
For collaborative apps (ISO/TS 15066), grippers need to avoid sharp edges and keep gripping force low to dodge pinching injuries. Lots of modern ones sense collisions and stop on a dime. And if power cuts out, a fail-safe like a mechanical spring ensures the load doesn't drop.
How does the gripper talk to the AGV's navigation stack?
It usually happens over industrial protocols like IO-Link, Modbus TCP, or ROS drivers. The navigation software directs the robot on where to head, and once it's in position, it kicks off the manipulation sequence through the gripper controller.
What is the maintenance requirement for mechanical grippers?
Maintenance is straightforward: just lubricate moving parts now and then, check the fingertips (pads) for wear, and double-check cable connections. Electric grippers need way less upkeep than pneumatic ones, which can develop seal issues or air leaks over time.
Can vacuum grippers work on porous surfaces like cardboard?
Yes, but you'll want a high-flow vacuum generator to handle air leaking through the material. Specialized suction cups with softer lips or foam sealing rings help create a solid seal on textured or porous surfaces too.
How much power do electric grippers pull from the AGV's battery?
It depends, but it's pretty low overall. Most energy gets used during actuation (opening and closing). Many have self-locking features that sip zero power to hold the grip once the object's secured, which is great for extending battery life on long hauls.
What is 3D vision integration with grippers?
3D vision works by mounting a camera on or near the gripper. It spots the object's position and orientation (pose estimation) in 3D space, then tweaks the gripper's approach to nab it successfully—even if the AGV isn't perfectly lined up.
Are custom 3D-printed fingers durable enough for industrial use?
More and more, yeah. With engineering-grade stuff like carbon-fiber-reinforced nylon, you can 3D print custom fingers that hug the exact shape of your part. It boosts grip stability and lets you prototype tooling fast without pricey machining.