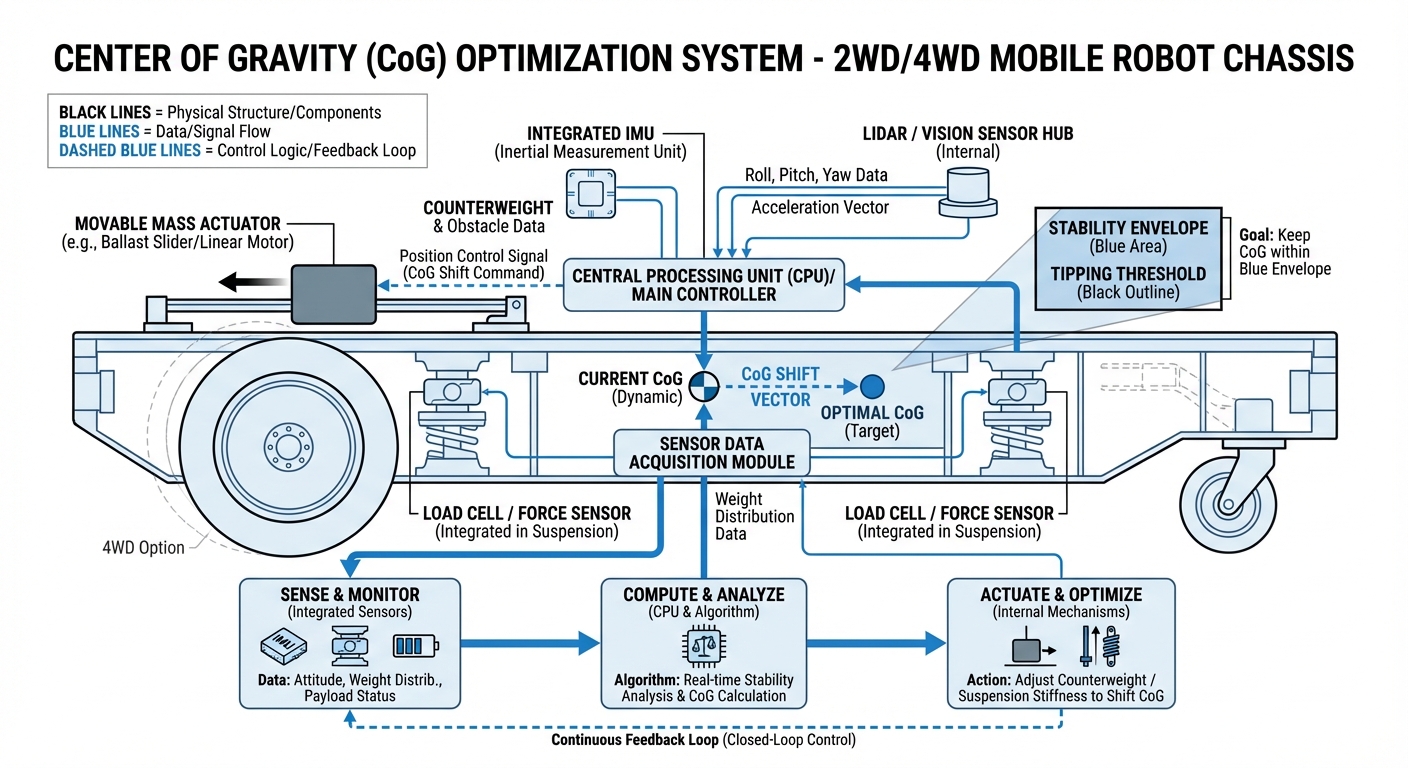
Center of Gravity Optimization
Nailing vehicle stability is key for cutting-edge AGVs. Learn how real-time Center of Gravity (CoG) tracking stops tip-overs, boosts acceleration, and keeps things safe in lively warehouses.

Core Concepts
Static Stability
The basic sweet spot: the robot's CoG projects straight down inside the wheel contact polygon.
Dynamic Load Shifts
Factoring in inertia during accel, braking, or turns—the CoG shifts on the fly, so tweak motor torques in real time.
Vertical Distribution
Taming Z-axis height. Dropping heavy stuff like batteries and motors low skyrockets stability when lifting.
Payload Variance
Handling surprise weights. A 50kg load feels worlds apart from 500kg; smart systems estimate mass to fine-tune controls.
Terrain Compensation
Tweaking CoG math for slopes or ramps. Even a 10° incline flips the tipping dynamics against gravity.
Active Balancing
In advanced bots, shift counterweights or tweak suspension on the fly to keep CoG dead center.
How It Works
CoG optimization isn't just hardware—it's ongoing software magic. Today's AGVs use IMUs to catch pitch, roll, and yaw in a blink.
Lifting a load? The combined CoG of bot and payload jumps up (and often forward). Software crunches the new 'Zero Moment Point' (ZMP). If it nears the wheel edges, it caps speed or accel to stay planted.
By figuring this out ahead of time, robots can speed up when it's safe and only slow down when they have to—boosting your throughput without risking the warehouse or your inventory.
Real-World Applications
High-Reach Forklift AGVs
In high-bay warehouses, hoisting heavy pallets 10+ meters high jacks up the center of gravity. Smart optimization algorithms cap travel speed based on fork height to stop any sideways tipping.
Liquid Transport (Hospitals/Chemicals)
Hauling liquids brings "sloshing" that makes the center of gravity shift and wobble dynamically. Advanced motion profiles ease acceleration to tame those forces and prevent spills.
Heavy Automotive Manufacturing
AMRs lugging car chassis or engine blocks handle massive loads. CoG optimization ensures emergency stops won't make the load slide or the robot nose-dive.
Outdoor & Ramp Logistics
Robots moving from loading docks to trucks tackle steep ramps. CoG logic tweaks traction control to avoid back-flips or wheel slip on those inclines.
Frequently Asked Questions
What happens if the center of gravity gets too high?
A high CoG slashes your stability margin. In corners, centrifugal force hits a taller lever arm, ramping up the tip-over risk. It also unloads the inner wheels, which can throw off navigation odometry.
Does CoG optimization require special sensors?
Yes, you usually need an IMU (Inertial Measurement Unit) to spot tilts and accelerations. Load cells or torque sensors in the lift mechanism help estimate payload mass and position too.
How does the robot figure out the payload's weight?
Robots often monitor lift motor current (more torque = heavier load) or use load cells in the suspension or lift plate. Some cutting-edge setups guess from vision, but direct force measurement is the gold standard for accuracy.
Can software fix a poorly designed robot chassis?
Software can dial back speed and acceleration to cut risks, but it can't rewrite physics. A narrow wheelbase with a high CoG is just unstable by nature, so the robot has to go slow to stay safe.
How do ramps affect Center of Gravity calculations?
On a ramp, gravity shifts relative to the robot's base—weight to the rear wheels going up, front coming down. The optimization algo factors in the slope to prevent back-flips or braking slip.
What is the "Support Polygon"?
The support polygon is the shape you get by linking the wheels' ground contact points. For static stability, the CoG's vertical projection has to stay inside it. Venture out, and the robot tips.
How does acceleration affect stability?
Accelerating kicks up an "inertial force" opposite your direction, at CoG height, creating torque that wants to lift the front wheels. CoG optimization caps accel to keep that torque in check.
Is this relevant for omnidirectional robots?
Absolutely. Omnidirectional robots—like those with Mecanum wheels—slide sideways, adding whole new tipping risks. CoG optimization gets way more intricate since they can tip any which way, not just fore/aft or side-to-side.
What safety standards govern CoG and stability?
ISO 3691-4 is the key standard for driverless industrial trucks. It requires stability in every expected scenario, from emergency braking to load handling, so thorough CoG analysis is non-negotiable.
Does battery placement impact CoG?
Yes, batteries are often the heaviest part of an AGV. Designers drop them as low as possible—usually as the chassis floor—to act like ballast, pulling down the overall CoG for better stability.
Can CoG shifts cause navigation errors?
Indirectly, yes. A high CoG during acceleration unloads the drive wheels, causing slip. That slip makes encoder data mismatch real travel distance, messing up localization in the nav stack.
What is "Dynamic Braking" in relation to CoG?
Dynamic braking here means adjusting brake force by load height. High forks demand gentle braking to avoid forward tipping; low forks let you brake hard for quicker stops.