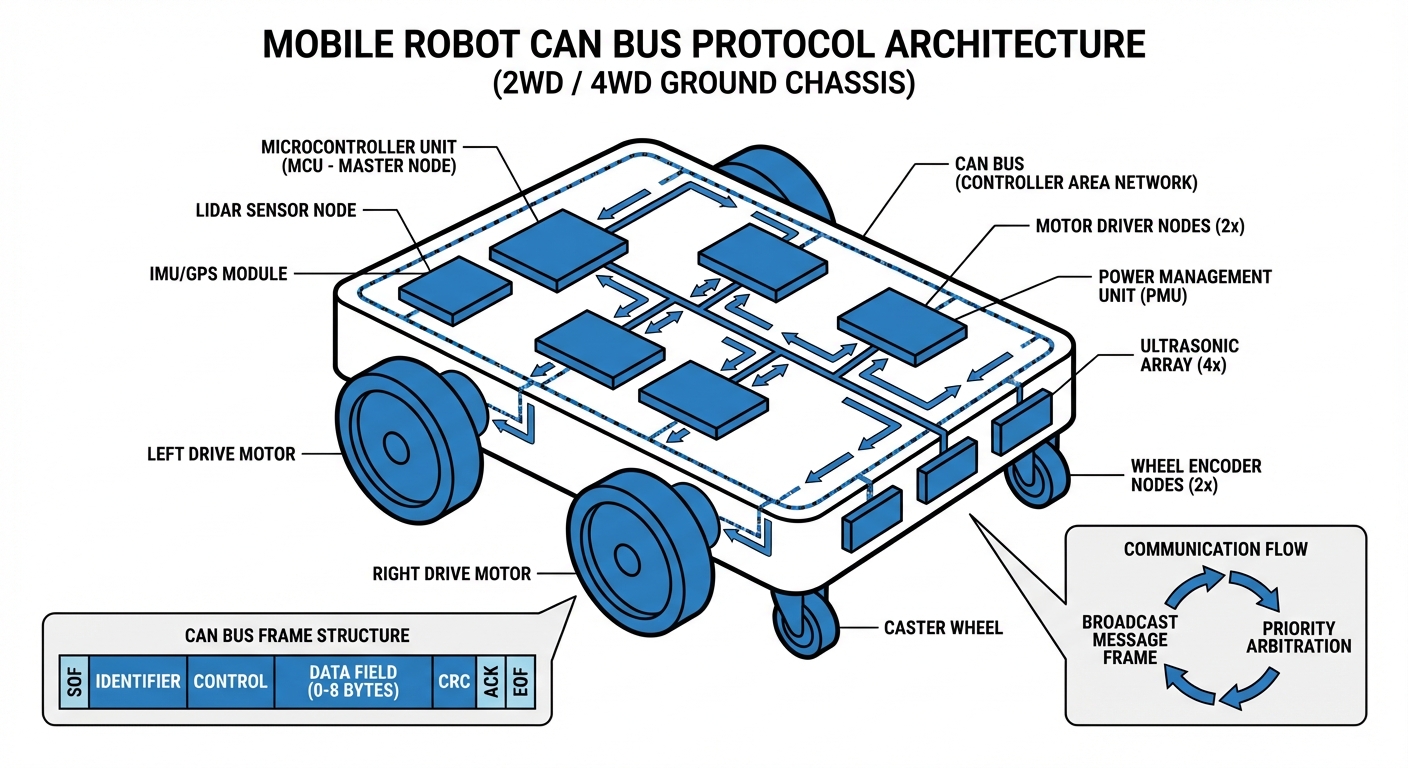
CAN Bus Protocol
The Controller Area Network (CAN) is like the nervous system for today's autonomous mobile robots. It handles tough, real-time chit-chat between microcontrollers, sensors, and actuators—no central boss needed—slashing wiring headaches and boosting reliability.

Core Concepts
Multi-Master Architecture
Unlike master-slave setups, any CAN bus node can start talking. Cuts lag and kills single failure points in AGV nav systems.
Differential Signaling
Data zips over two wires (CAN High and CAN Low), shrugging off electromagnetic noise—key in rowdy factories.
Message Priority
CAN's ID-based arbitration lets critical safety messages (like 'Emergency Stop') bulldoze less urgent ones (like 'Battery Level') with zero data loss.
Error Confinement
Built-in error checks mean a bad node auto-isolates, saving the whole robot fleet network.
Reduced Wiring
A single twisted wire pair for everything? CAN slashes wiring weight and cost in intricate mobile bots.
Robust Scalability
Tack on new sensors or modules to an AGV? Just splice into the bus—upgrades and retrofits are a breeze.
How It Works
CAN reads voltage differences, not absolutes. Two wires: (High) and (Low). Recessive (1): both ~2.5V. Dominant (0): H to 3.5V, L to 1.5V.
This diff voltage cancels noise—if interference hits one wire, it hits both the same, keeping the gap steady. AGVs thrive near welders or big motors because of it.
Plus, CAN's 'Non-Destructive Bitwise Arbitration': Two nodes talking? Dominant (0) wins over recessive (1). Loser backs off as receiver—priority message flies through instantly.
Real-World Applications
Motor & Drive Control
Motor controllers get velocity commands and send encoder data over CAN, syncing wheels perfectly for sharp differential steering in warehouse bots.
Battery Management (BMS)
BMS streams cell voltage, temp, and current via CAN. Main brain watches to auto-charge before batteries tank.
Hydraulic Lift Systems
Automated forklifts swap hydraulic pump and valve data over CAN for pressure and height—smooth lifts, no messy analog wires.
Safety Sensor Integration
Safety might double up lines, but diagnostic feeds from LiDARs and e-stops hit CAN for fleet managers' detailed logs.
Frequently Asked Questions
Why pick CAN Bus over USB or Ethernet for robot guts?
CAN's rock-solid real-time and deterministic, USB's host-tied and finicky, Ethernet lags (though industrial versions are closing in). CAN's diff signaling laughs off motor noise.
What's the maximum cable length and speed for CAN Bus?
There's always a trade-off between speed and length. At 1 Mbit/s, you're looking at about 40 meters max. Drop to 125 kbit/s, and you can stretch it to 500 meters. For most AGVs, 1 Mbit/s is the go-to standard—it keeps response times snappy within the tight chassis space.
Why do I need a 120 Ohm resistor at the ends of the bus?
It's called termination. Those resistors stop signal reflections (like pesky echoes) from garbling your data. You put them at both physical ends of the bus, matching the cable's characteristic impedance (usually 120Ω). Skip them, and errors will plague your comms.
What is the difference between CAN 2.0 and CAN FD?
CAN FD (Flexible Data-rate) builds on the classic protocol. It ramps up data speeds in the frame's data phase (up to 5-8 Mbps) and bumps payload from 8 bytes to 64—ideal for modern robots crunching more data.
How does CAN Bus handle message collisions?
It uses bitwise arbitration tied to the Message ID. Lower IDs win priority (Dominant bits trump Recessive ones). If nodes clash, the higher-priority one sails through, while the other pauses and retries—no critical data lost.
What are CANopen and J1939?
CAN covers just the physical and data link layers; it spells out to send data, but not it means. That's where higher-layer protocols like CANopen (industrial automation) and J1939 (heavy vehicles) come in—they standardize the data format so devices from different makers work together seamlessly.
What happens if a device on the bus fails?
If a device craps out physically (say, power loss), it usually goes high-impedance and stays out of the bus's way. If it starts spitting garbage, the CAN controller's error confinement kicks in, eventually putting that node in "Bus Off" mode to isolate it—keeping the rest of your robot humming safely.
Is twisted pair cabling strictly necessary?
Yes. Twisting the cable wires makes external electromagnetic interference hit both equally. The receiver checks the voltage difference between them, canceling out that common-mode noise. No twists? Your noise protection falls apart.
Can I use a "Star" topology for wiring my AGV?
Ideally, no. CAN thrives on a "Bus" or "Line" topology with super-short stubs (branches). Stars breed signal reflections that tank communication, especially at higher speeds. Keep those stubs tiny—under 30cm if possible.
How many nodes can I connect to a single CAN network?
Theory-wise, it's the identifier space (2,032 for standard CAN), but reality hits with transceiver electrical load. Standard ones handle up to 110 nodes. Fancy transceivers go higher, but bandwidth overload usually caps it first.
How do I troubleshoot a CAN bus error on an AGV?
Kick off with power off: measure resistance between CAN_H and CAN_L (aim for ~60Ω). Confirm common grounds across nodes. Scope the signals for noise or reflections. Then, fire up a CAN analyzer to check error frames and bus load.
Is CAN Bus secure against cyber attacks?
Native CAN skips encryption or authentication, so anyone jacking into the wires can inject messages. Smart robotics setups layer on higher-level security (like SecOC) or gateways to shield the internal CAN from external wireless threats.