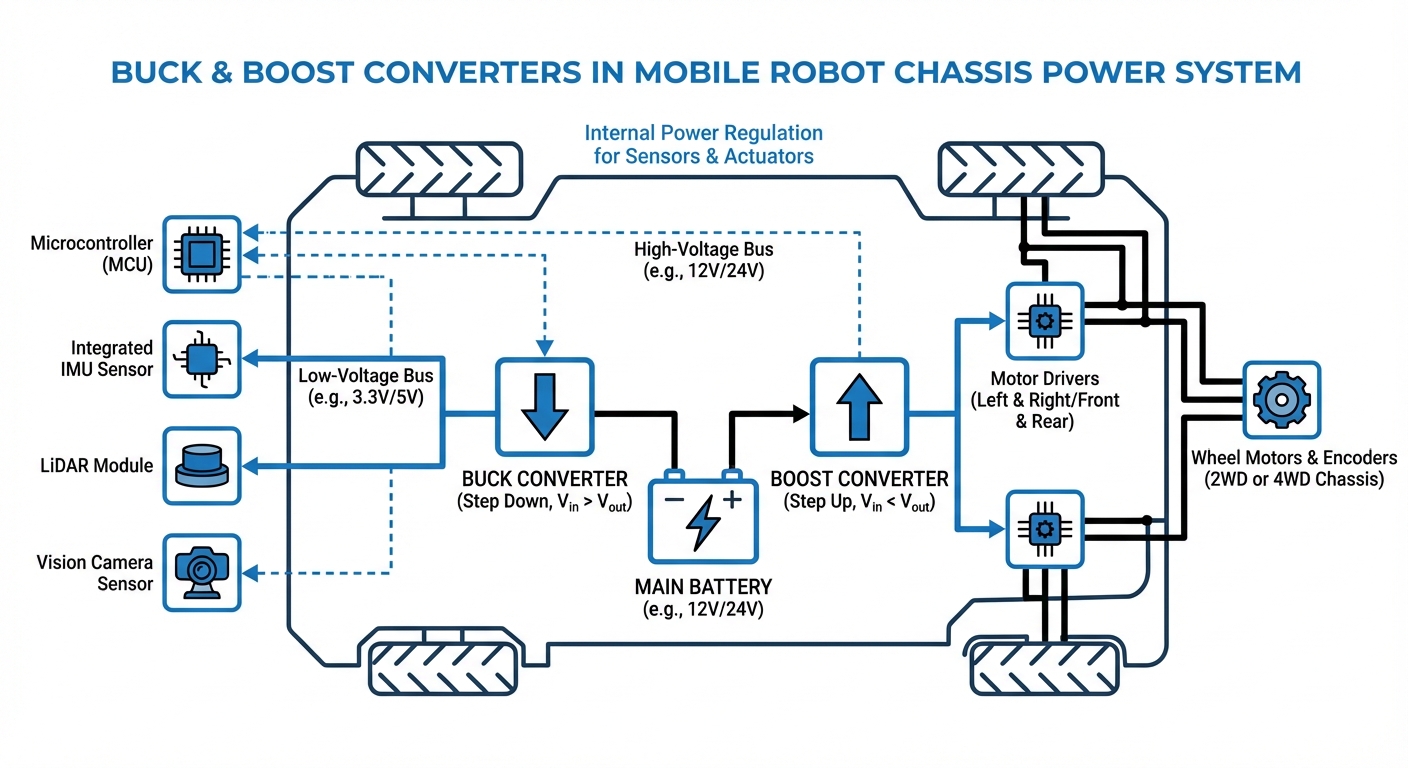
Buck and Boost Converters
Master the power game for your AGV fleet. Buck and boost converters stabilize those flaky battery voltages, keeping sensors, PLCs, and drives running smoothly under any load.

Core Concepts
Buck Conversion
Also called step-down. It efficiently drops high battery voltage (e.g., 48V) to logic levels (5V or 3.3V) with way less heat than linear regulators.
Boost Conversion
The step-up magic. It boosts low input voltage to higher output—key when batteries dip below what components need, like 24V sensors.
Power Efficiency
Unlike LDOs, switching converters hit 90-95% efficiency. In robots, that means longer battery life and less heat crammed inside the chassis.
Voltage Regulation
It holds output voltage steady no matter load changes or input swings. This keeps picky LiDAR and nav systems from rebooting unexpectedly.
Switching Noise
These converters switch super fast, creating 'ripple.' Smart designs add filters so EMI doesn't mess with wireless comms.
Thermal Management
High-current converters run hot. Good designs use heatsinks or PCB thermal vias to shed heat and avoid shutdowns during heavy AGV lifts.
How It Works: The Switching Cycle
At the heart of every switching converter (SMPS) sits a high-frequency switch (usually a MOSFET) flipping on and off thousands of times per second, chopping input DC into pulses.
Energy Storage:
Feedback Loop:
Real-World Applications
LiDAR & Navigation Power
LiDAR needs a solid 12V. As AGV battery fades from 24V to 18V, a Buck converter delivers clean, noise-free 12V to nav sensors—no localization hiccups.
Computing Units (IPC/PLC)
Industrial PCs freak out over voltage drops. Buck-Boost converters keep voltage steady even during high-current spikes like motor startups that sag the battery.
Motor Braking Energy
When AGVs brake, motors generate power. Boost converters in regen braking step up back-EMF to feed energy back to the battery, boosting runtime.
Peripheral Integration
Warehouse robots mix 5V USB gear (cameras, Wi-Fi dongles) and 24V actuators on a 48V chassis. Dedicated Buck converters let it all share one power bus peacefully.
Frequently Asked Questions
What is the main difference between a Buck and a Boost converter?
Buck converters step down voltage (e.g., 24V to 12V). Boost does the reverse, stepping up (e.g., 12V to 24V). Both use switching for top efficiency.
Why should I use a switching converter instead of a linear regulator (LDO) for AGVs?
LDOs turn extra voltage into heat—super wasteful for robotics' big drops and high currents. Switching converters (Buck/Boost) deliver 85-95% efficiency, saving battery and skipping huge heatsinks in tight AGV spaces.
What is a Buck-Boost converter and when is it necessary?
Buck-Boost steps voltage up or down. Essential for battery bots where voltage starts high (e.g., 14V for 12V need) when full, then drops low (e.g., 10V)—keeping output constant at 12V.
How does ripple voltage affect AGV sensors?
High ripple (power line noise) can glitch analog sensors, jitter servos, or scramble LiDAR data. Robot-grade converters use output caps and LC filters to tame ripple below 50mV.
How do I size a converter for my mobile robot?
Tally max continuous and peak currents (including startup surges). Pick one rated 20-30% above peak for reliability and to dodge thermal shutdowns in hard tasks.
What are isolated vs. non-isolated converters?
Non-isolated converters share input/output grounds—simpler and cheaper. Isolated ones use transformers for electrical separation, shielding logic boards from motor spikes or ground loops.
Do switching converters cause electromagnetic interference (EMI)?
Yes, fast switching creates EMI that can jam Wi-Fi or LoRa. AGVs handle it with shielded cables, solid PCB ground planes, and converters using spread-spectrum dithering.
What happens if the load current exceeds the converter's rating?
Modern converters have over-current protection (OCP). They 'fold back' voltage to cap current or 'hiccup' (shut down/restart cycles) until fixed—might reset your robot.
Can I parallel multiple converters to get more current?
Generally, no. Without 'current sharing' or multiphase design, tiny voltage differences make one hog the load and fail. Stick to a single converter sized for total load.
How does Quiescent Current (Iq) affect autonomous robots?
Quiescent current is what the converter draws in standby (no load). For idle or sleeping AGVs, low Iq is crucial to avoid draining the battery during long downtimes.
What are synchronous vs. non-synchronous converters?
Non-synchronous use diodes for freewheeling—causing drops and heat. Synchronous swap in a second MOSFET for better efficiency, ideal for high-end battery robotics.