Ackermann Steering Geometry
The gold-standard kinematics for zippy stability and long-lasting tires in autonomous mobile robots. Ackermann geometry gives inner and outer wheels their own paths to avoid slip on turns.

Core Concepts
Geometric Center
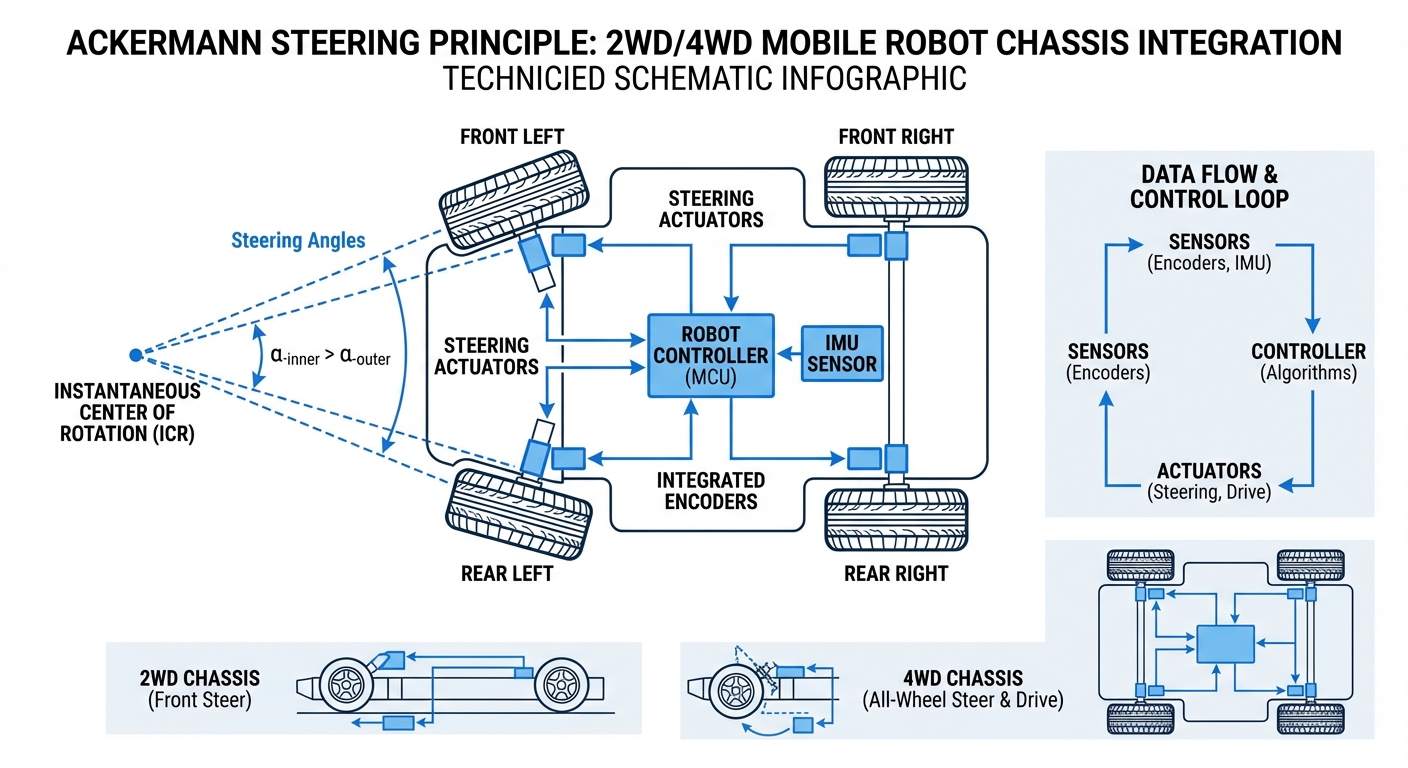
Ackermann steering's magic? All wheel axles point to one "Instantaneous Center of Rotation" (ICR), nixing wheel scrub.
Non-Holonomic Constraints
Unlike mecanum wheels, Ackermann rigs have limits—they can't sidestep. Path planners must factor in turning radii.
High-Speed Stability
This setup delivers killer straight-line stability at speed over differential drive bots, perfect for outdoor hauls and long trips.
Trapezoidal Linkage
Done with a steering trapezoid linkage, so the inner wheel cranks sharper than the outer on curves.
Tire Efficiency
No side slip means way less tire wear, saving fleet ops big on maintenance.
Electronic Differentials
Today's EV robots often fake Ackermann in software ("Electronic Differential") with independent motors, ditching mechanical links.
How It Works
Steering a four-wheeler's tough: inner wheel travels shorter on turns. Parallel steering? Slip city—friction, wear, power waste.
Ackermann fixes it by cranking the inner wheel sharper ($\delta_i$) than outer ($\delta_o$). Math checks out: cot($\delta_o$) - cot($\delta_i$) = track width / wheelbase.
In robots, nailing this kinematic model is key for odometry and planning. Controllers compute rear wheel speeds and front steering for buttery arcs.
Real-World Applications
Autonomous Tuggers
Seen in factories towing cart trains. Ackermann keeps traction solid under thousands of kilos.
Last-Mile Delivery Bots
Sidewalk and road delivery bots lean on it for speed stability and curb ramps without slips.
Agricultural Robotics
Farm tractors and harvesters use it to glide fields, sparing soil and crops from skid damage.
Hospital Logistics
Hospital AGVs hauling linens or waste love it—quiet, floor-friendly vs. differential rumble.
Frequently Asked Questions
What’s the big split between Ackermann and Differential Drive?
Differential tweaks wheel speeds for turns, spins in place (zero radius), but wobbles at speed. Ackermann steers via angles (mech or electronic) for top stability and efficiency, but minimum turn radius applies.
Does Ackermann steering allow for zero-radius turns?
Nope, true Ackermann can't pirouette in place. Needs forward/back motion, with min radius from max steer angle and wheelbase.
How does Ackermann geometry impact robot odometry?
Ackermann odometry shines over distance thanks to low slip. But it's non-linear ($x, y, \theta$), so trickier equations than differential's basics.
What is an "Electronic Differential" in this context?
No bulky mechanical diff needed—independent rear motors let software dial exact speeds from steering angle for flawless effect.
Is Ackermann steering suitable for narrow warehouse aisles?
Usually not. No zero-turn means wide aisles needed. For tight VNA spots, go mecanum, swerve, or differential.
How do you path plan for an Ackermann robot?
Planners must honor non-holonomic limits—think Hybrid A* or Reeds-Shepp. No sideways cheats; respect that min radius.
What is the "Jeantaud" diagram?
Jeantaud diagram graphs the perfect linkage. Guides arm angles on axles for spot-on Ackermann approx.
Why is it preferred for outdoor robots?
Rough outdoor turf? Ackermann grips better, controls traction. Skid-steering (differential) chews power and tires on grippy asphalt.
Does Ackermann geometry work in reverse?
Yep, the geometry works in reverse too, but control gets shaky (like backing up a trailer). Autonomous systems rely on strong feedback loops to stop "jackknifing" or wobbling when reversing an Ackermann-steered robot.
What happens if the geometry is slightly off?
That's called "Ackermann Error." Perfect geometry is ideal, but small deviations happen all the time and are totally fine (modern cars do parallel steering at low speeds). Big errors, though, mean tire scrubbing, higher motor strain, and drained batteries faster.
Is Double Ackermann steering different?
Absolutely. Double Ackermann (or 4-wheel steering) turns both front and rear axles. It shrinks the turning radius a ton and lets you "crab walk" diagonally – a sweet spot between classic Ackermann and full omnidirectional drive.
What sensors are required for control?
At the very least, grab rotary encoders on the drive wheels for speed and distance, plus an absolute encoder or potentiometer on the steering column to track the current steering angle ($\phi$). IMUs are a smart add-on to fix wheel slip.